

Human arm movements described by a low-dimensional superposition of principal components
- PMID: 10648712
- PMCID: PMC6774180
- DOI: 10.1523/JNEUROSCI.20-03-01066.2000
Human arm movements described by a low-dimensional superposition of principal components
Abstract
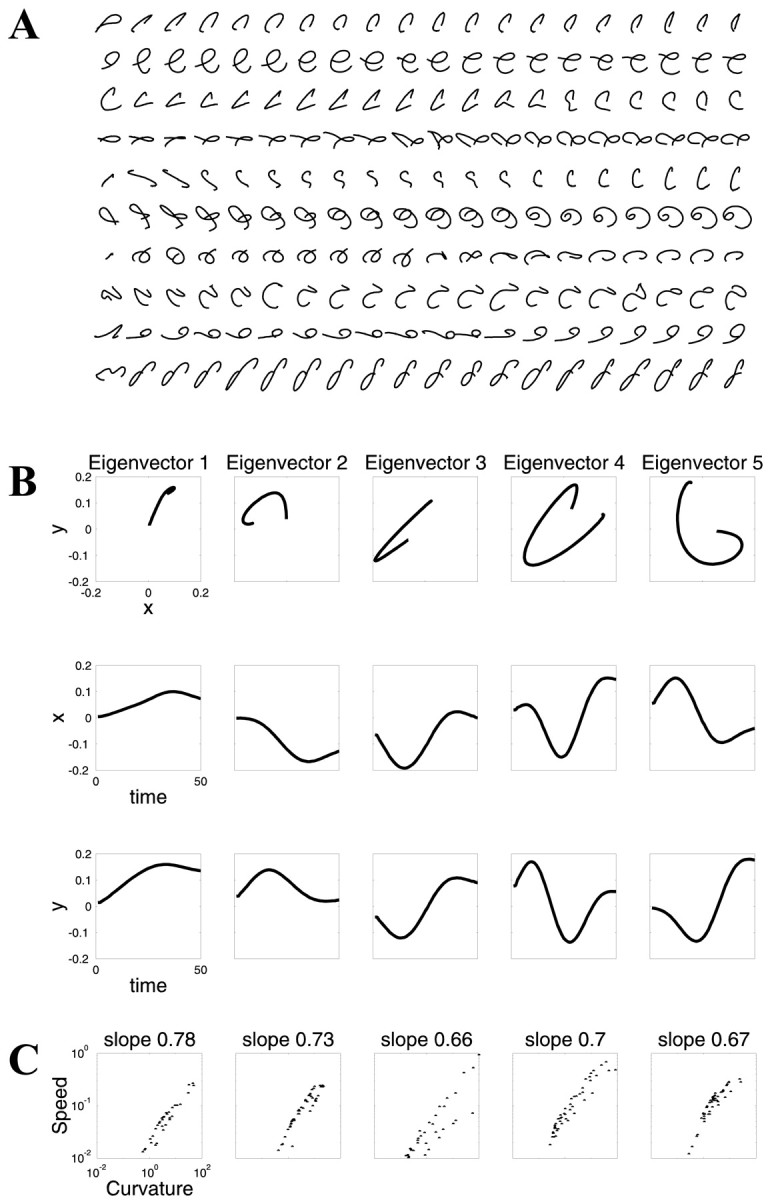
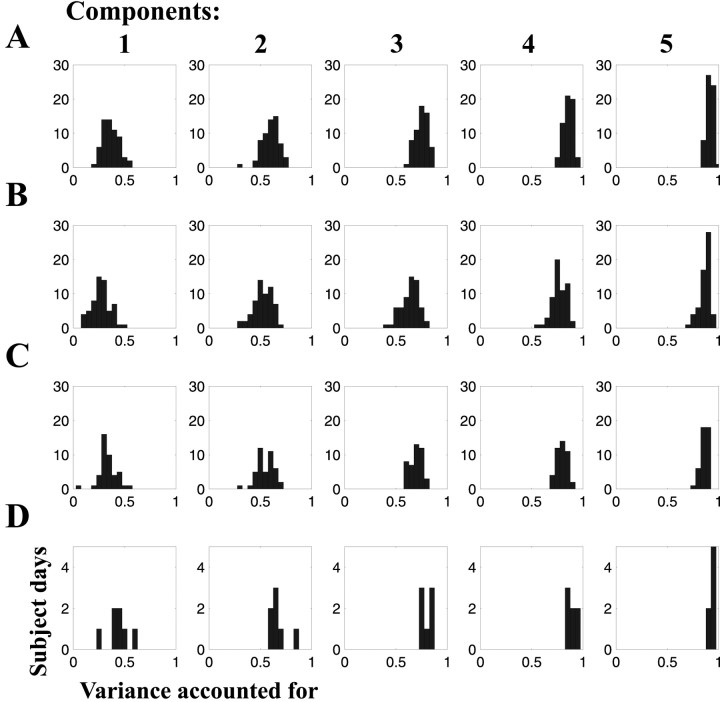
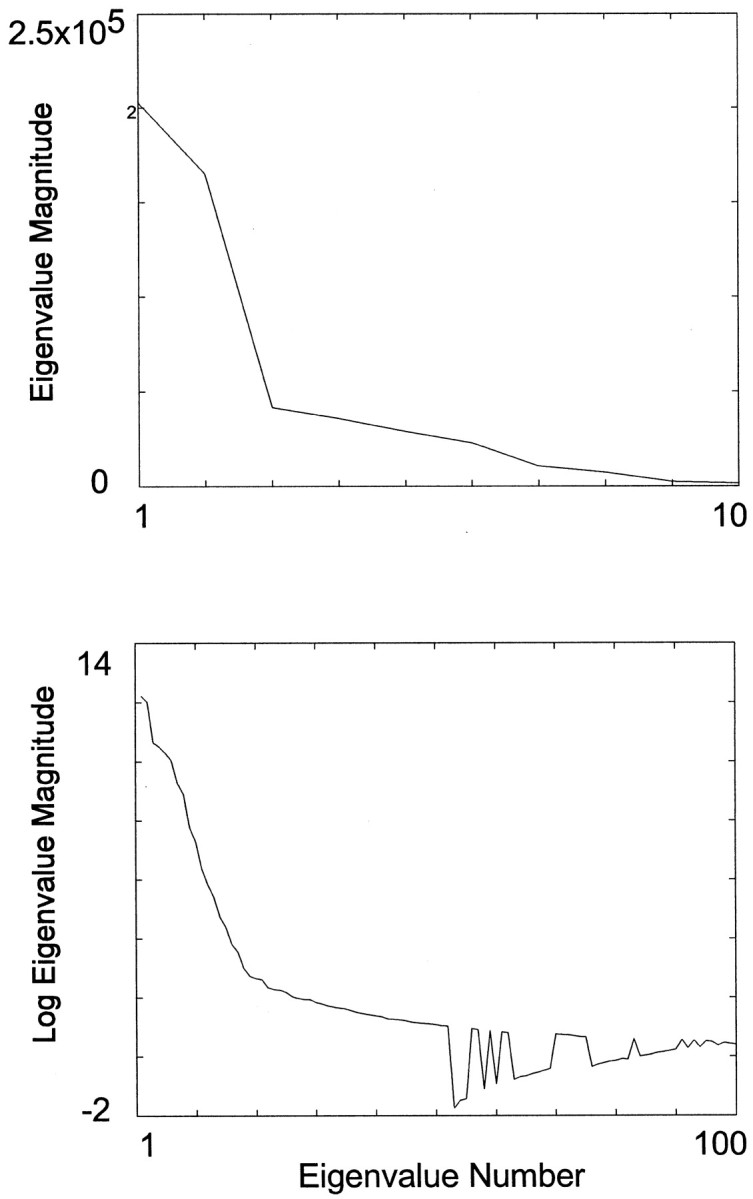
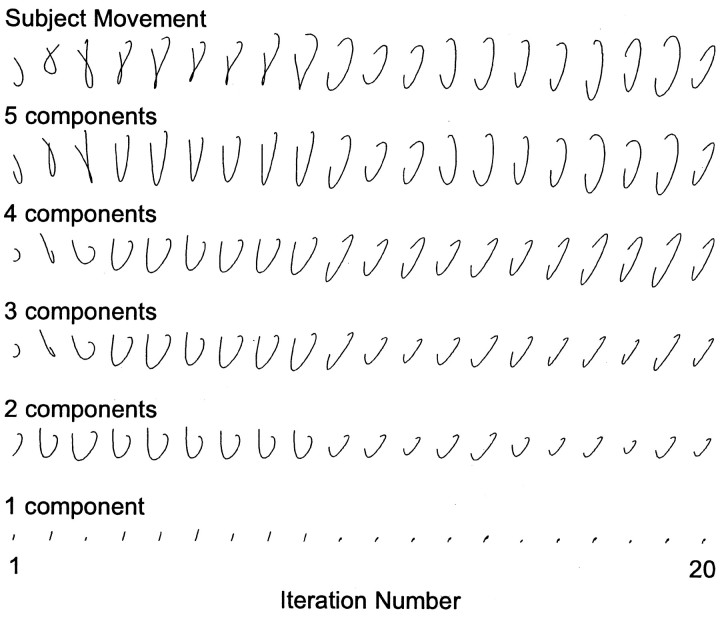
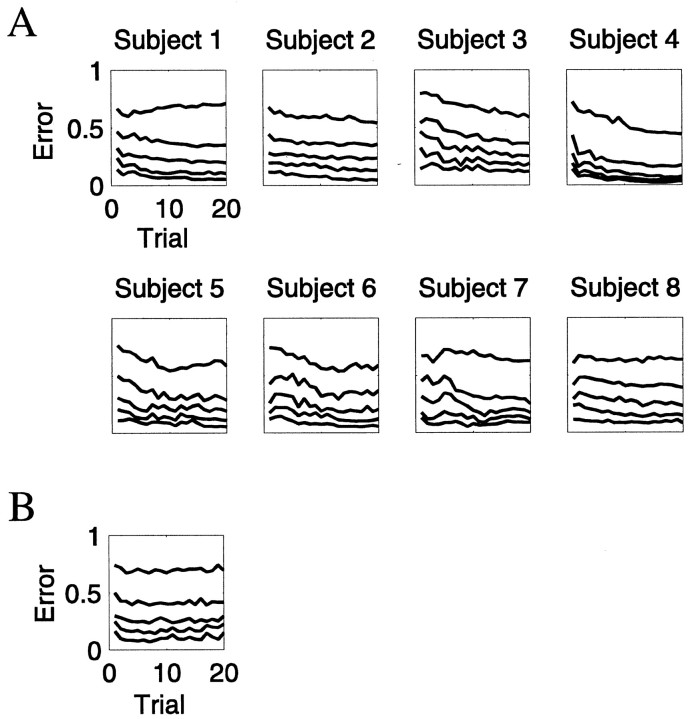
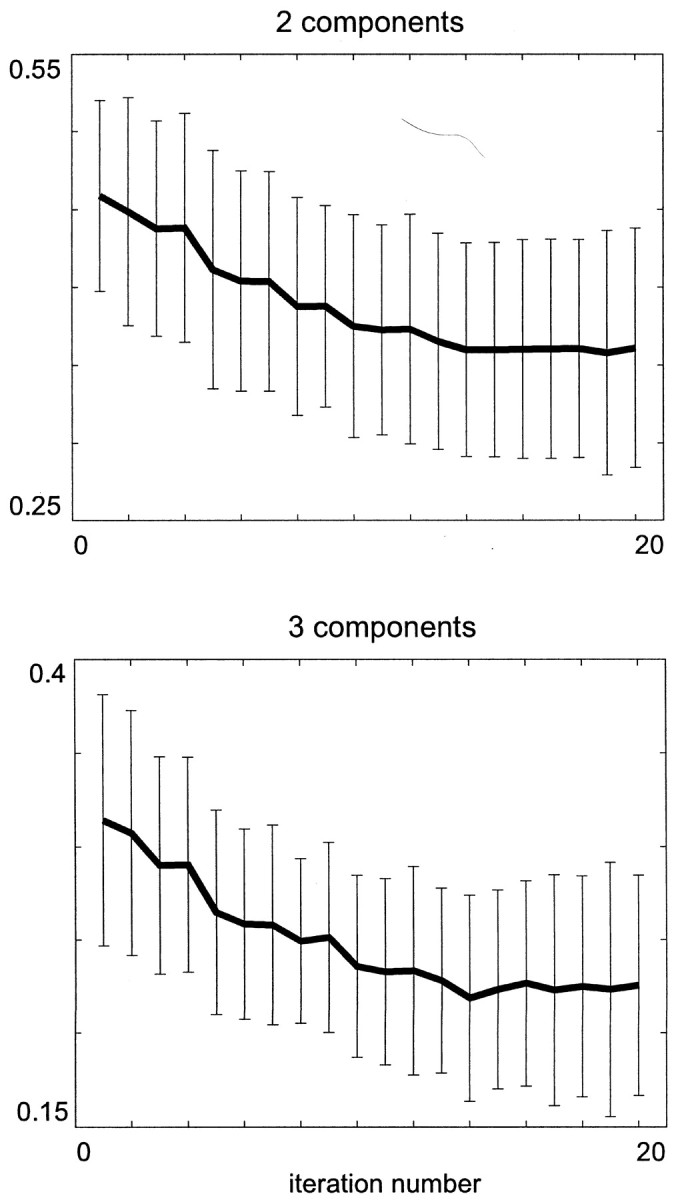
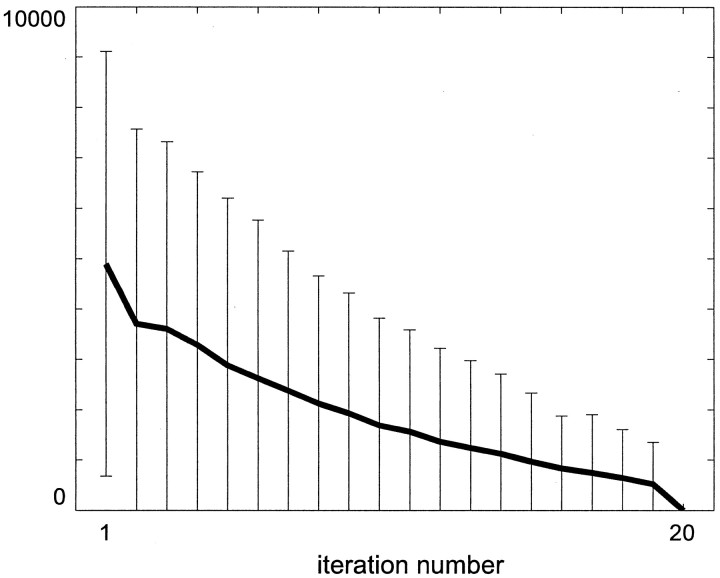
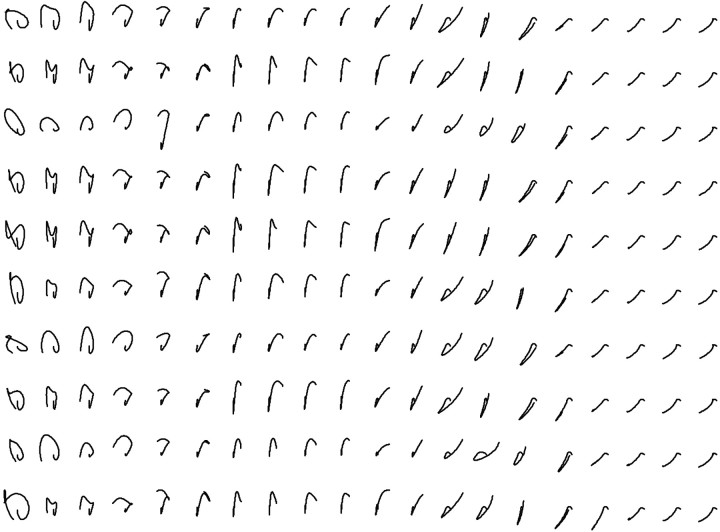
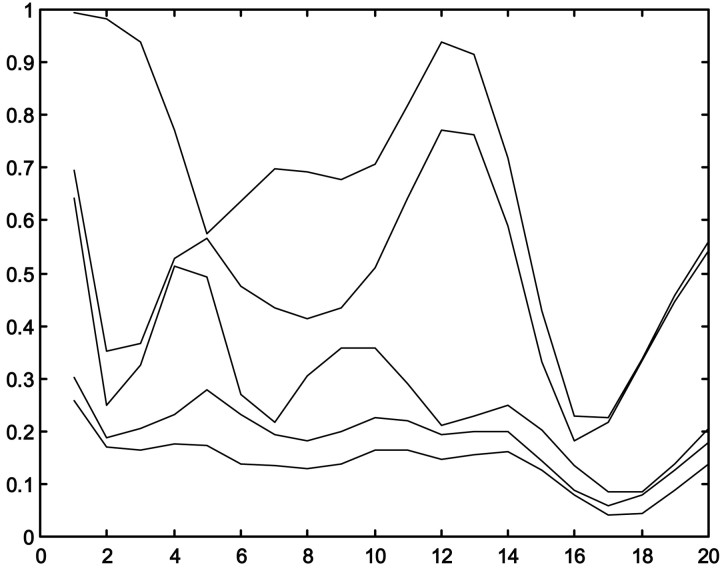
A new method for analyzing kinematic patterns during smooth movements is proposed. Subjects are asked to move the end of a two-joint manipulandum to copy a smooth initial target path. On subsequent trials the target path is the subject's actual movement from the preceding trial. Using Principal Components Analysis, it is shown that the trajectories have very low dimension and that they converge toward a linear superposition of the first few principal components. We show similar results for handwriting on an electronic pen tablet. We hypothesize that the low dimensionality and convergence are attributable to combined properties of the internal controller and the musculoskeletal system. The low dimensionality may allow for efficient descriptions of a large class of arm movements.
Figures
References
-
- Alexandrov A, Frolov A, Massion J. Axial synergies during human upper trunk bending. Exp Brain Res. 1998;118:210–220. - PubMed
-
- Amis AA, Dowson D, Wright V. Muscle strengths and musculoskeletal geometry of the upper limb. Eng Med. 1979;8:41–48.
-
- Atkeson C (1990) Comparison of memory-based motor learning with other neural network approaches.Abstracts Neural Networks for Computing Conference, April.Snowbird, UT.
-
- Atkeson CG. Learning arm kinematics and dynamics. Annu Rev Neurosci. 1989;12:157–183. - PubMed
-
- Bennett DJ, Hollerbach JM, Xu Y, Hunter IW. Time-varying stiffness of human elbow joint during cyclic voluntary movement. Exp Brain Res. 1992;88:433–442. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources