

Differences in control of limb dynamics during dominant and nondominant arm reaching
- PMID: 10805666
- PMCID: PMC10709817
- DOI: 10.1152/jn.2000.83.5.2661
Differences in control of limb dynamics during dominant and nondominant arm reaching
Abstract
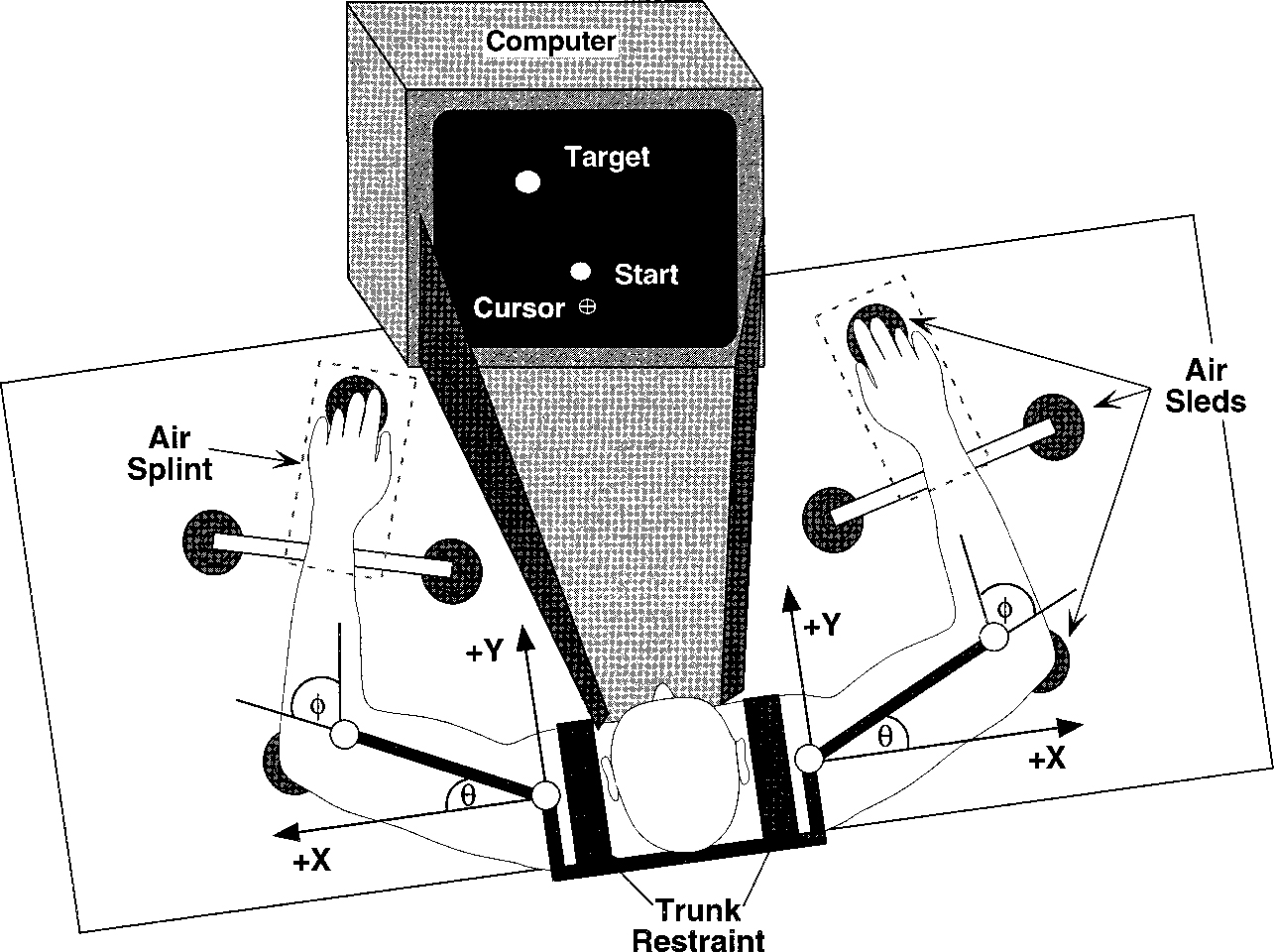
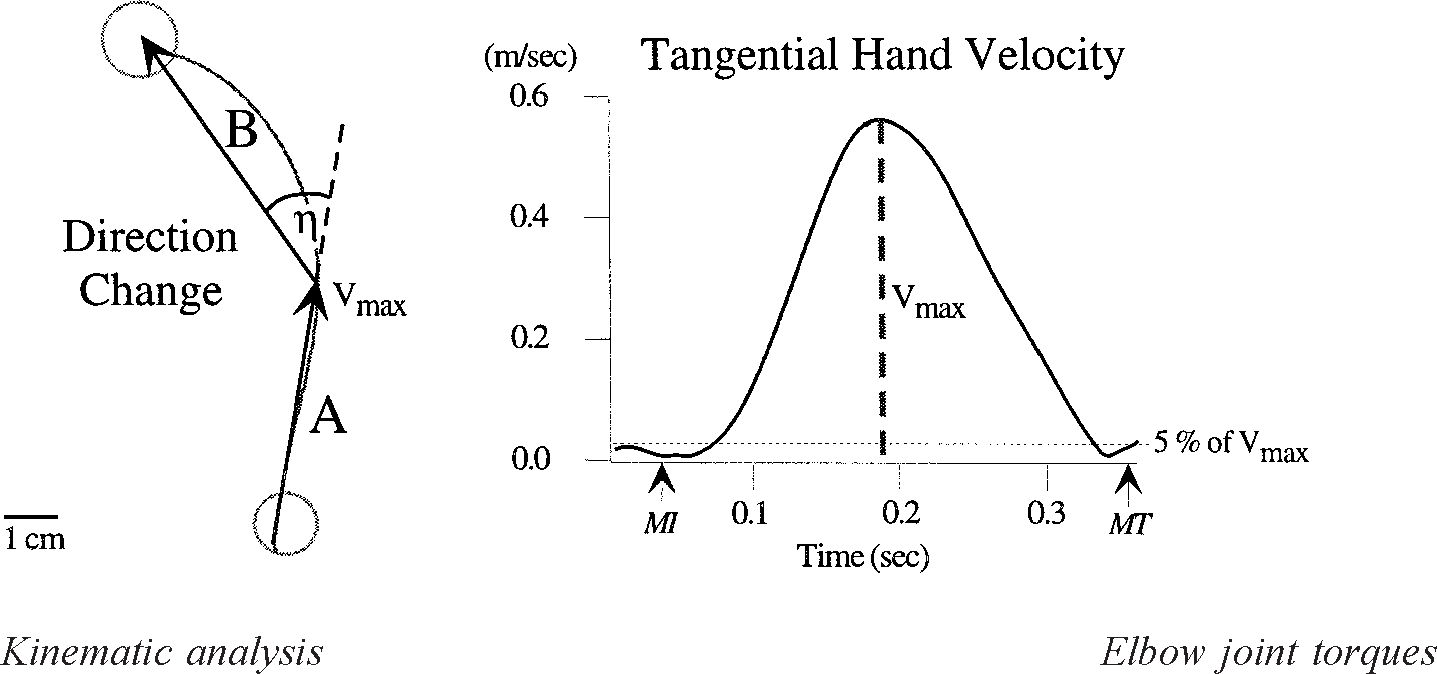
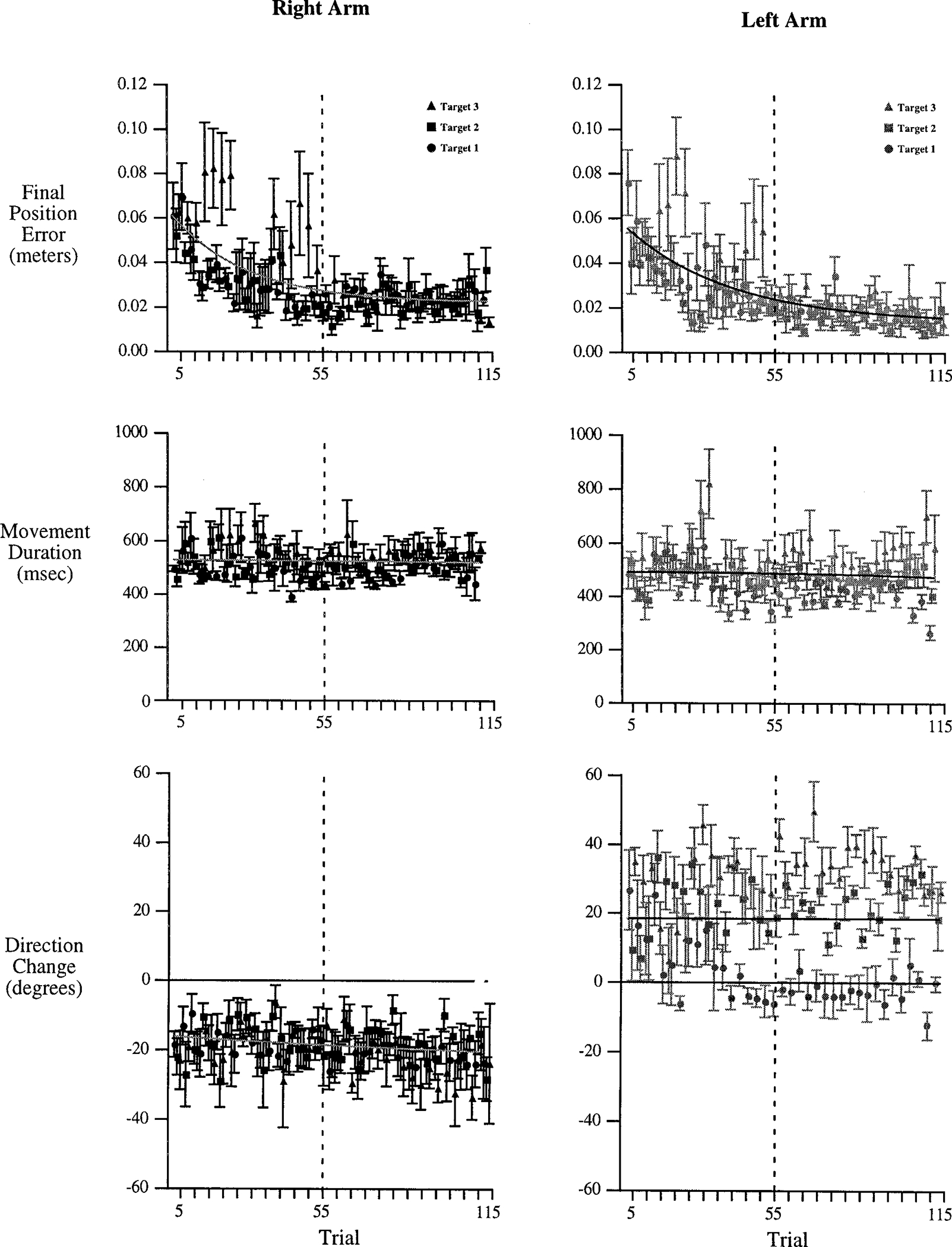
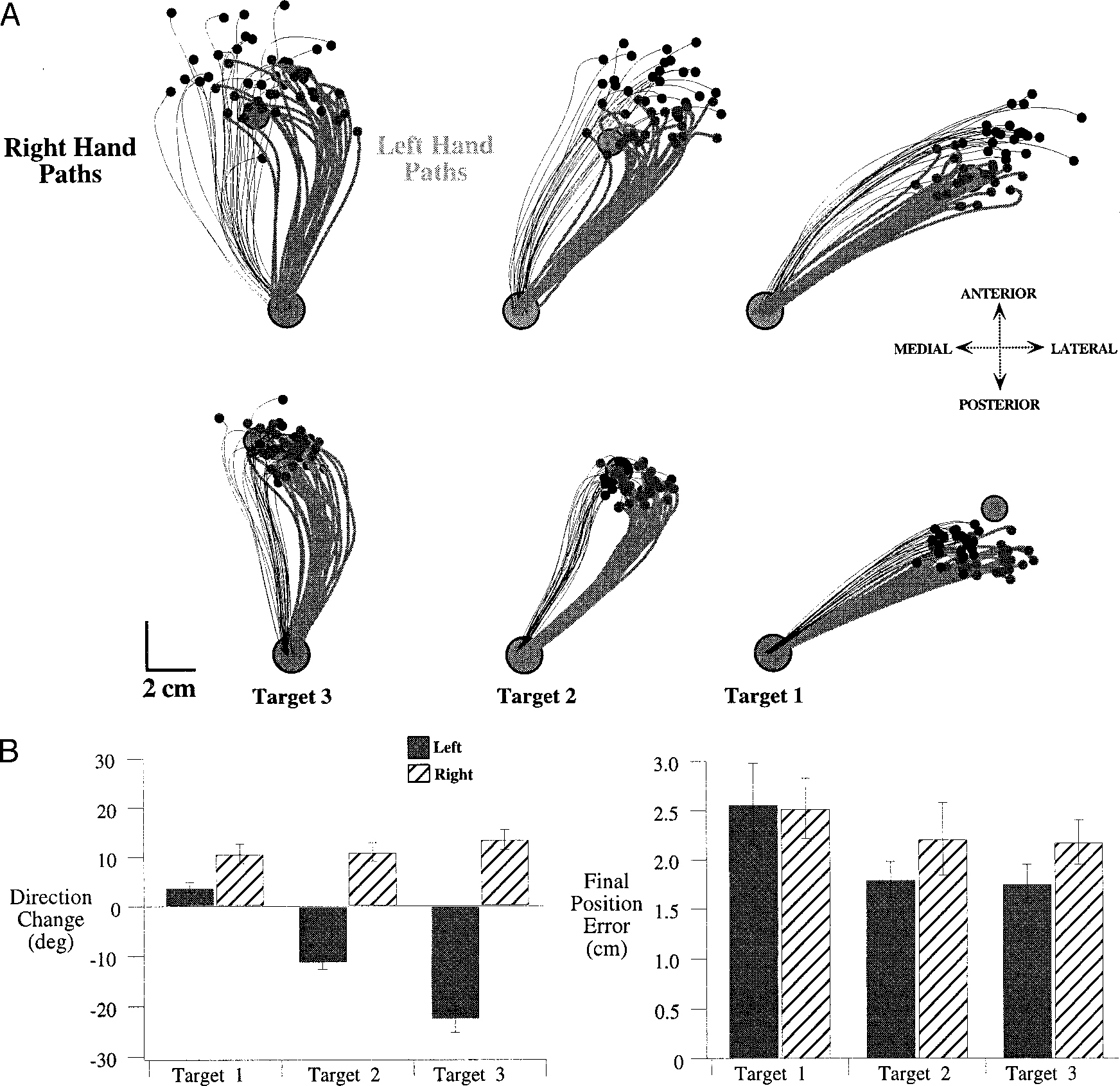
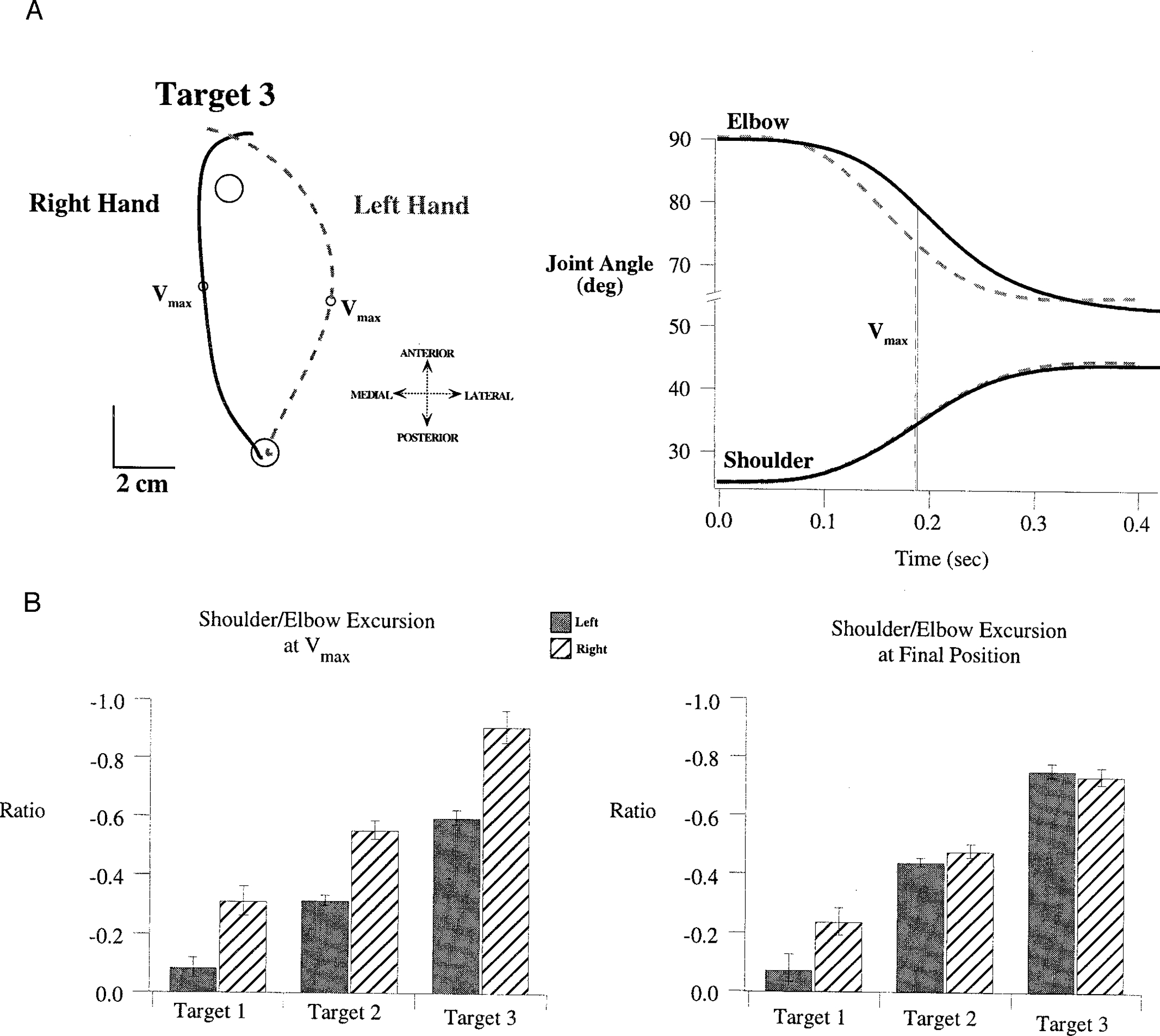
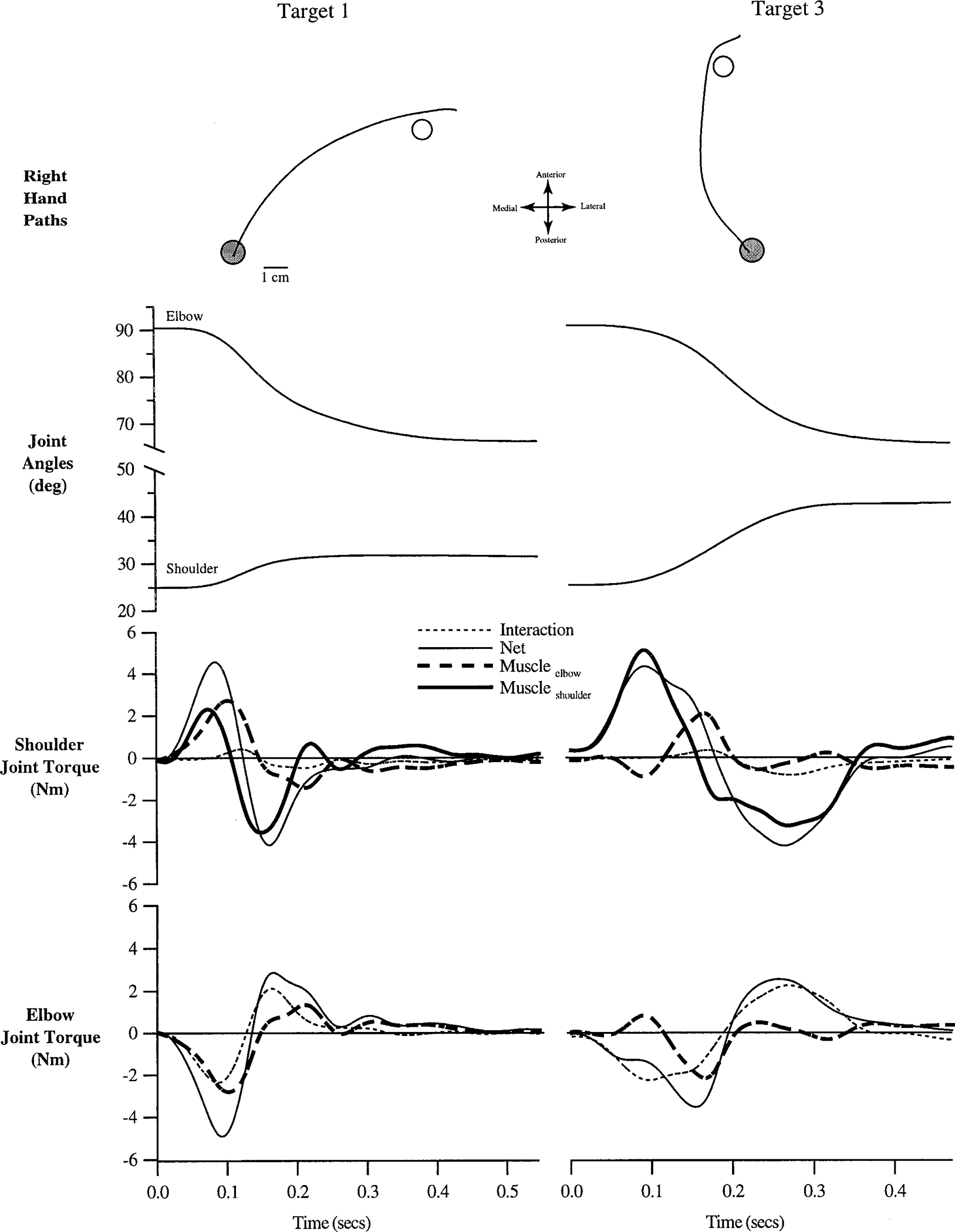
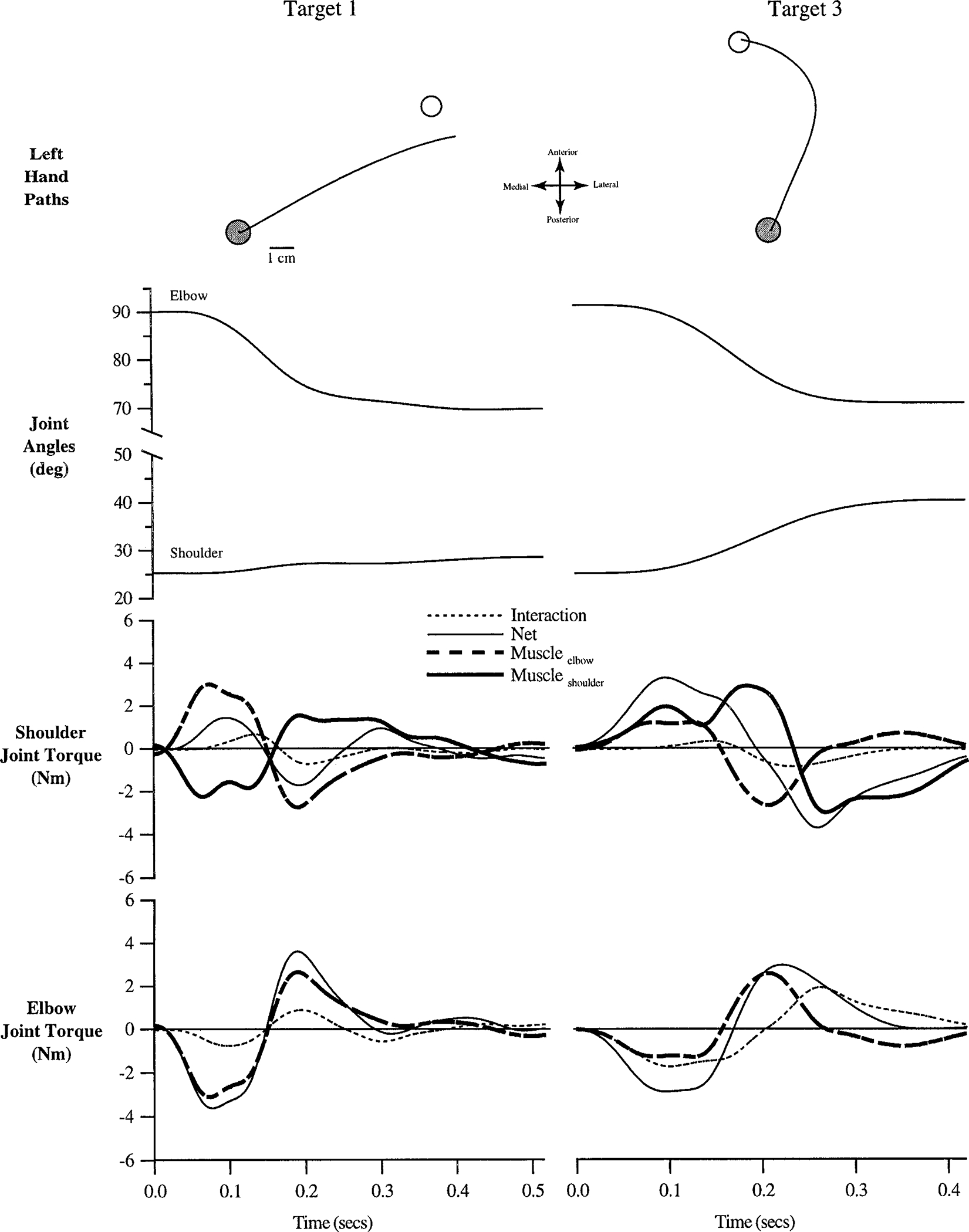
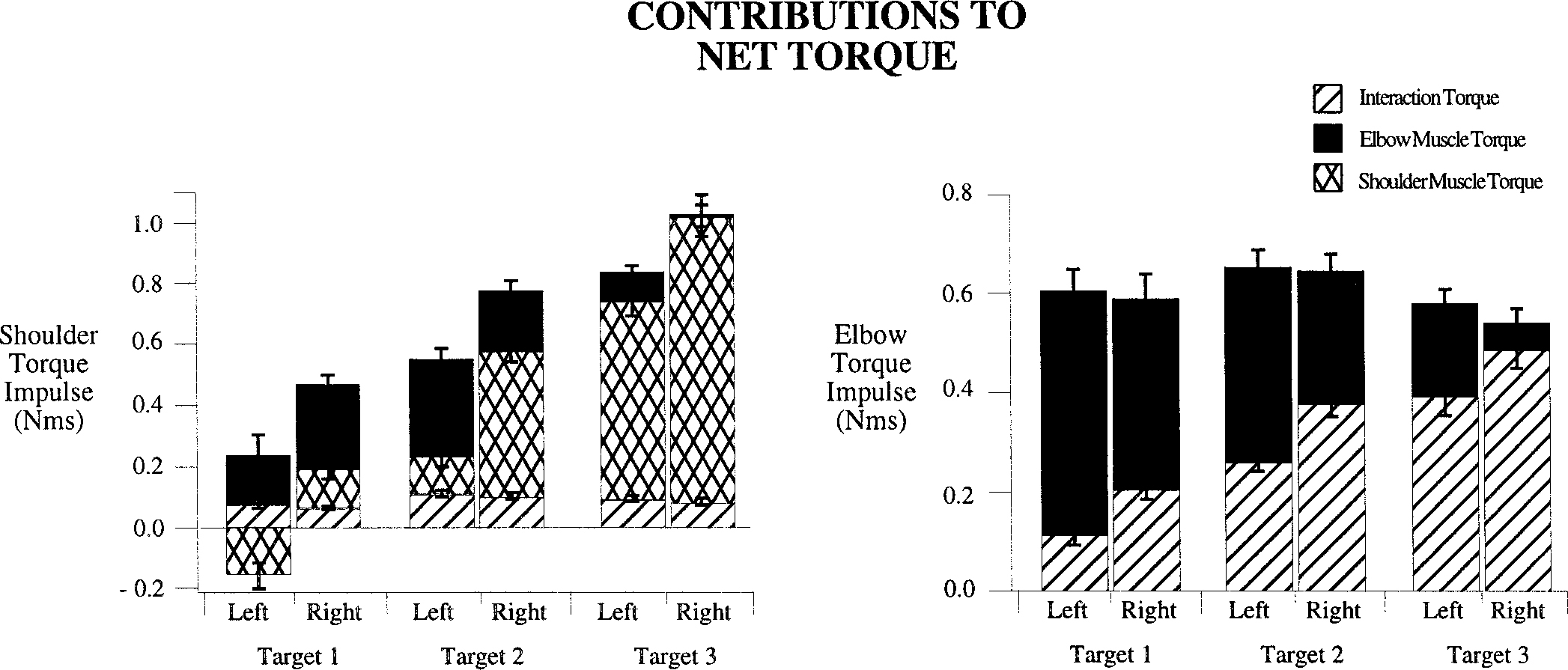
This study compares the coordination patterns employed for the left and right arms during rapid targeted reaching movements. Six right-handed subjects reached to each of three targets, designed to elicit progressively greater amplitude interaction torques at the elbow joint. All targets required the same elbow excursion (20 degrees ), but different shoulder excursions (5, 10, and 15 degrees, respectively). Movements were restricted to the shoulder and elbow and supported on a horizontal plane by a frictionless air-jet system. Subjects received visual feedback only of the final hand position with respect to the start and target locations. For motivation, points were awarded based on final position accuracy for movements completed within an interval of 400-600 ms. For all subjects, the right and left hands showed a similar time course of improvement in final position accuracy over repeated trials. After task adaptation, final position accuracy was similar for both hands; however, the hand trajectories and joint coordination patterns during the movements were systematically different. Right hand paths showed medial to lateral curvatures that were consistent in magnitude for all target directions, whereas the left hand paths had lateral to medial curvatures that increased in magnitude across the three target directions. Inverse dynamic analysis revealed substantial differences in the coordination of muscle and intersegmental torques for the left and right arms. Although left elbow muscle torque contributed largely to elbow acceleration, right arm coordination was characterized by a proximal control strategy, in which movement of both joints was primarily driven by the effects of shoulder muscles. In addition, right hand path direction changes were independent of elbow interaction torque impulse, indicating skillful coordination of muscle actions with intersegmental dynamics. In contrast, left hand path direction changes varied directly with elbow interaction torque impulse. These findings strongly suggest that distinct neural control mechanisms are employed for dominant and non dominant arm movements. However, whether interlimb differences in neural strategies are a consequence of asymmetric use of the two arms, or vice versa, is not yet understood. The implications for neural organization of voluntary movement control are discussed.
Figures

References
-
- Amunts K, Schlaug G, Schleicher A, Steinmetz H, Dabringhaus A, Roland PE, and Zilles K Asymmetry in the human motor cortex and handedness. Neuroimage 4: 216–222, 1996. - PubMed
-
- Annett J, Annett M, and Hudson PTW The control of movement in the preferred and non-preferred hands. Q. J. Exp. Psychol. B 31: 641–652, 1979. - PubMed
-
- Annett M Parallels between asymmetries of Planum temporale and of hand skill. Neuropsychologia 30: 951–962, 1992. - PubMed
-
- Bizzi E Motor control mechanisms. An overview. Neurologic Clinics 5: 523–528, 1987. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources