

Parking strategies for genome sequencing
- PMID: 10899151
- PMCID: PMC310895
- DOI: 10.1101/gr.10.7.1020
Parking strategies for genome sequencing
Abstract
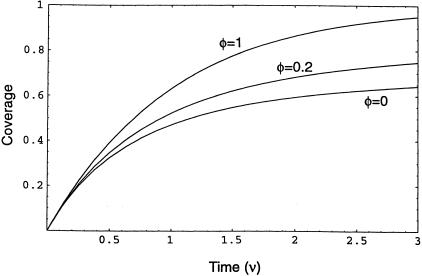
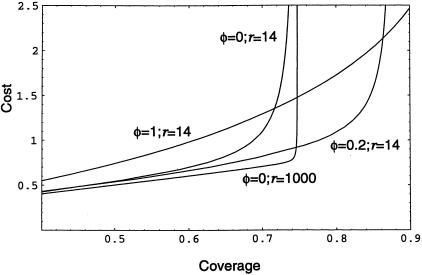
The parking strategy is an iterative approach to DNA sequencing. Each iteration consists of sequencing a novel portion of target DNA that does not overlap any previously sequenced region. Subject to the constraint of no overlap, each new region is chosen randomly. A parking strategy is often ideal in the early stages of a project for rapidly generating unique data. As a project progresses, parking becomes progressively more expensive and eventually prohibitive. We present a mathematical model with a generalization to allow for overlaps. This model predicts multiple parameters, including progress, costs, and the distribution of gap sizes left by a parking strategy. The highly fragmented nature of the gaps left after an initial parking strategy may make it difficult to finish a project efficiently. Therefore, in addition to our parking model, we model gap closing by walking. Our gap-closing model is generalizable to many other strategies. Our discussion includes modified parking strategies and hybrids with other strategies. A hybrid parking strategy has been employed for portions of the Human Genome Project.
Figures







References
-
- Arratia R, Lander ES, Tavare S, Waterman MS. Genomic mapping by anchoring random clones: A mathematical analysis. Genomics. 1991;11:806–827. - PubMed
-
- Arratia R, Martin D, Reinert G, Waterman MS. Poisson process approximation for sequence repeats, and sequencing by hybridization. J Comput Biol. 1996;3:425–463. - PubMed
-
- Bánkövi G. On gaps generated by a random space filling procedure. Magyar Tud Akad Mat Kutató Int Közl. 1962;7:395–407.
-
- Batzoglou S, Berger B, Mesirov J, Lander ES. Sequencing a genome by walking with clone-end sequences: A mathematical analysis. Gen Res. 1999;9:1163–1174. - PubMed
-
- Cox DR. Renewal Theory. London, England: Methuen & Company; 1962.
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Research Materials
Miscellaneous