

Kinematics and dynamics are not represented independently in motor working memory: evidence from an interference study
- PMID: 11826139
- PMCID: PMC6758505
- DOI: 10.1523/JNEUROSCI.22-03-01108.2002
Kinematics and dynamics are not represented independently in motor working memory: evidence from an interference study
Abstract
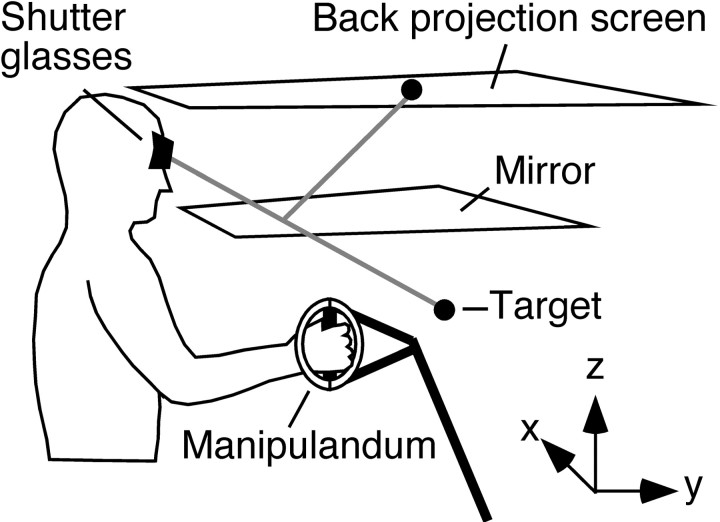
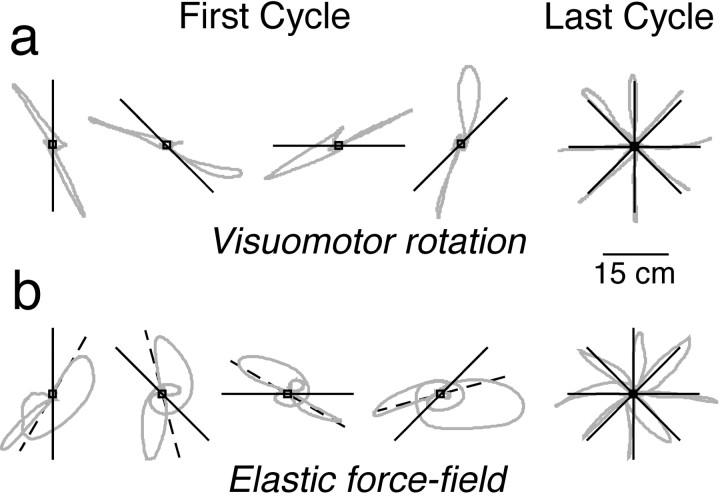
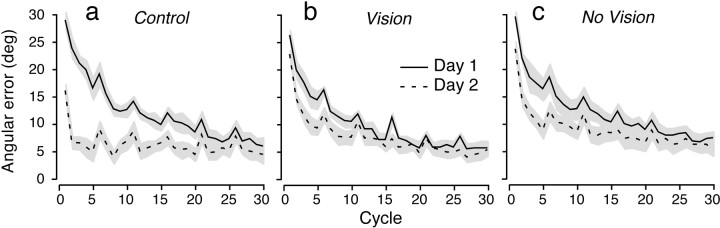
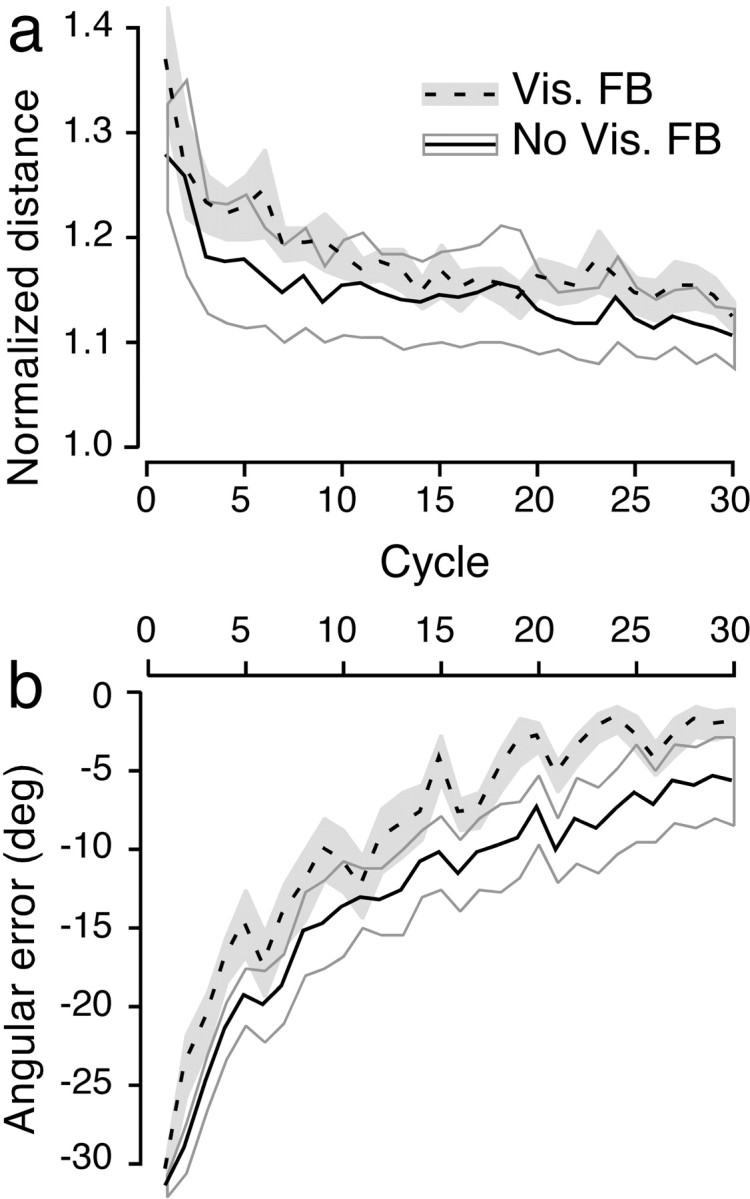
Our capacity to learn multiple dynamic and visuomotor tasks is limited by the time between the presentations of the tasks. When subjects are required to adapt to equal and opposite position-dependent visuomotor rotations (Krakauer et al., 1999) or velocity-dependent force fields (Brashers-Krug et al., 1996) in quick succession, interference occurs that prevents the first task from being consolidated in memory. In contrast, such interference is not observed between learning a position-dependent visuomotor rotation and an acceleration-dependent force field. On the basis of this finding, it has been argued that internal models of kinematic and dynamic sensorimotor transformations are learned independently (Krakauer et al., 1999). However, these findings are also consistent with the perturbations interfering only if they depend on the same kinematic variable. We evaluated this hypothesis using kinematic and dynamic transformations matched in terms of the kinematic variable on which they depend. Subjects adapted to a position-dependent visuomotor rotation followed 5 min later by a position-dependent rotary force field either with or without visual feedback of arm position. The force field tended to rotate the hand in the direction opposite to the visuomotor rotation. To assess learning, all subjects were retested 24 hr later on the visuomotor rotation, and their performance was compared with a control group exposed only to the visuomotor rotation on both days. Adapting to the position-dependent force field, both with and without visual feedback, impaired learning of the visuomotor rotation. Thus, interference between our kinematic and dynamic transformations was observed, suggesting that the key determinant of interference is the kinematic variable on which the transformation depends.
Figures

References
-
- Bock O, Schneider S, Bloomberg J. Conditions for interference versus facilitation during sequential sensorimotor adaptation. Exp Brain Res. 2001;138:359–365. - PubMed
-
- Brashers-Krug T, Shadmehr R, Bizzi E. Consolidation in human motor memory. Nature. 1996;382:252–255. - PubMed
-
- Conditt MA, Gandolfo F, Mussa-Ivaldi FA. The motor system does not learn the dynamics of the arm by rote memorization of past experience. J Neurophysiol. 1997;78:554–560. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources