

Patterns of hand motion during grasping and the influence of sensory guidance
- PMID: 11850469
- PMCID: PMC6757566
- DOI: 10.1523/JNEUROSCI.22-04-01426.2002
Patterns of hand motion during grasping and the influence of sensory guidance
Abstract
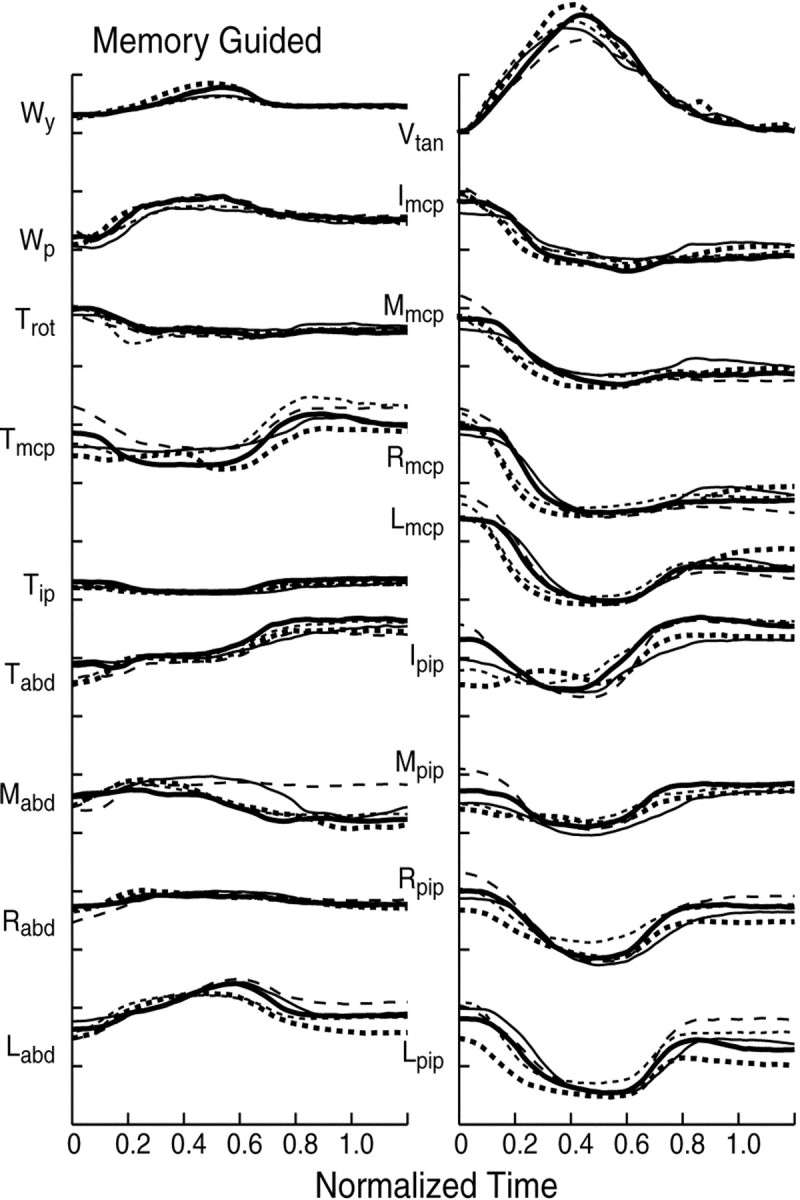
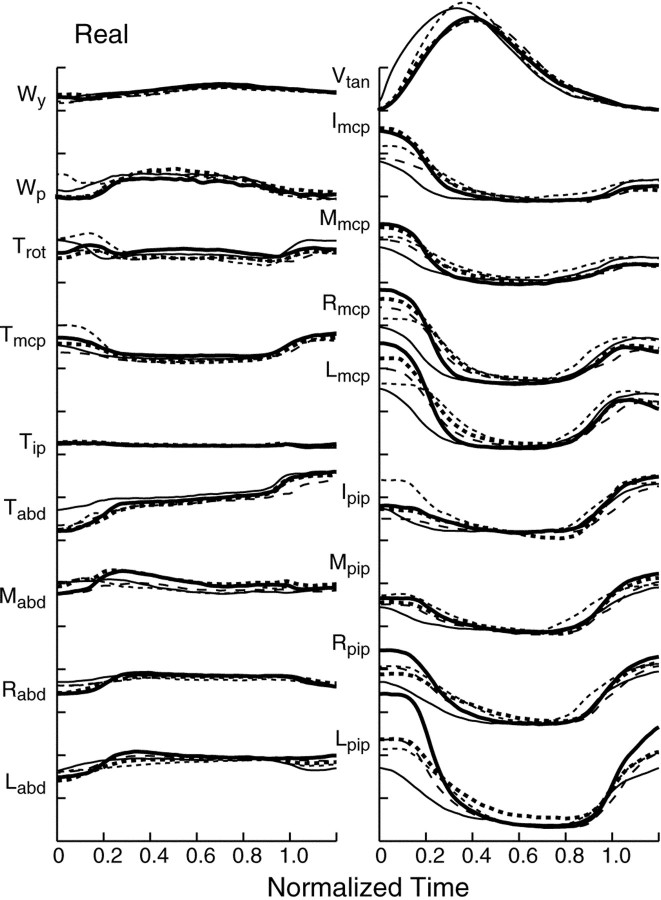
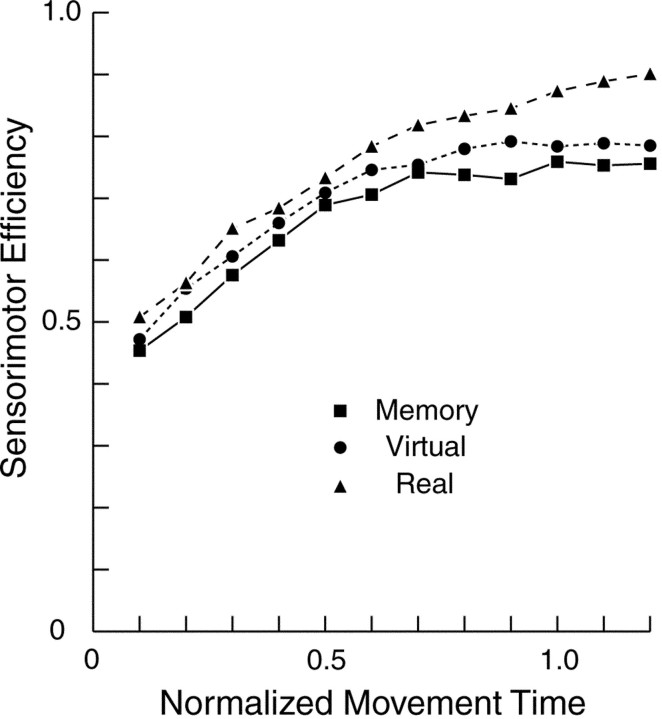
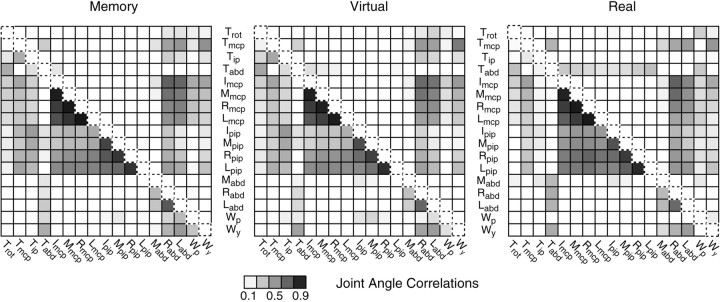
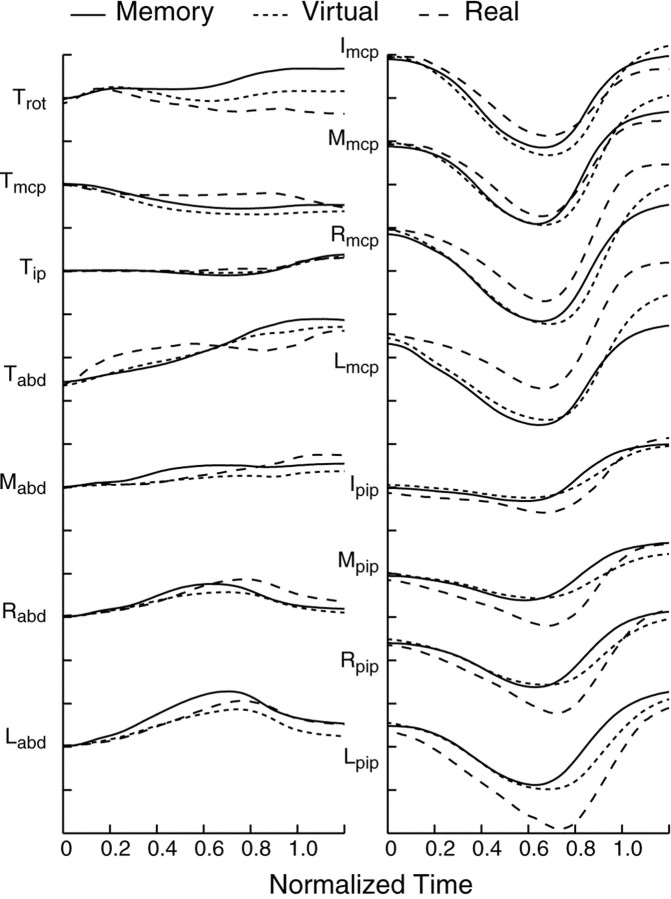
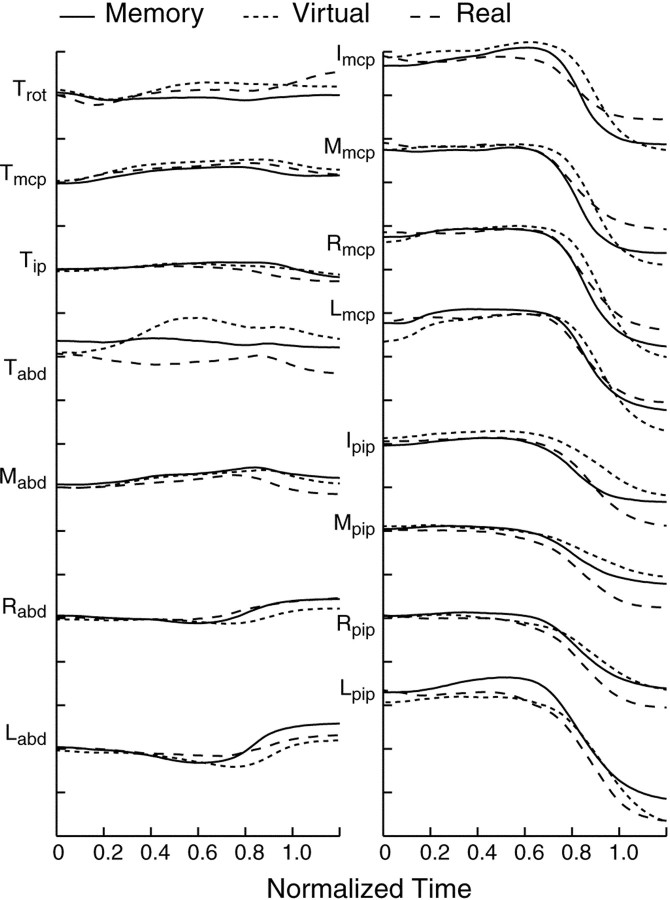
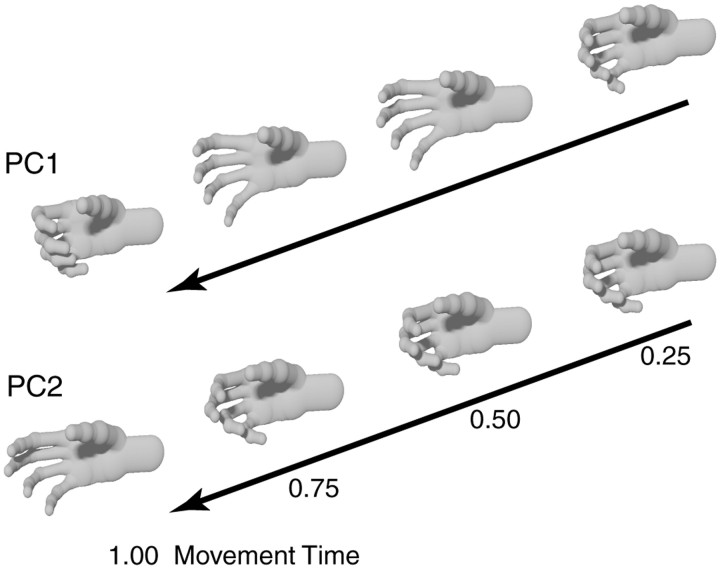
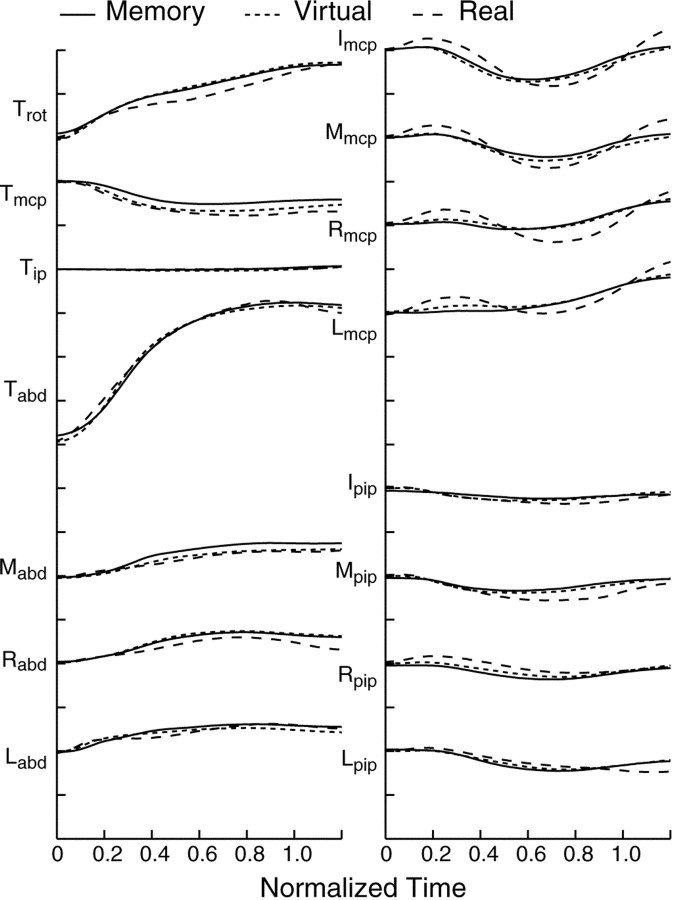
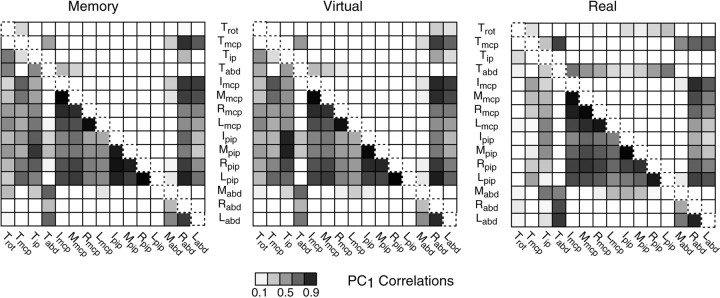
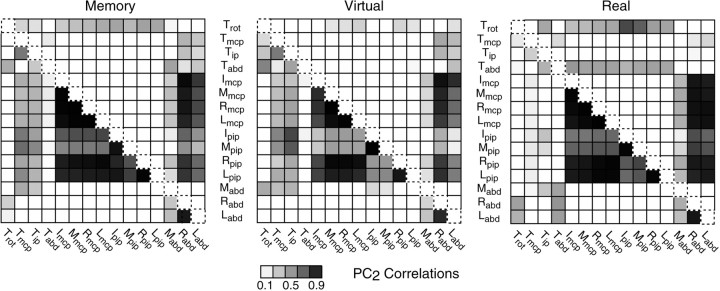
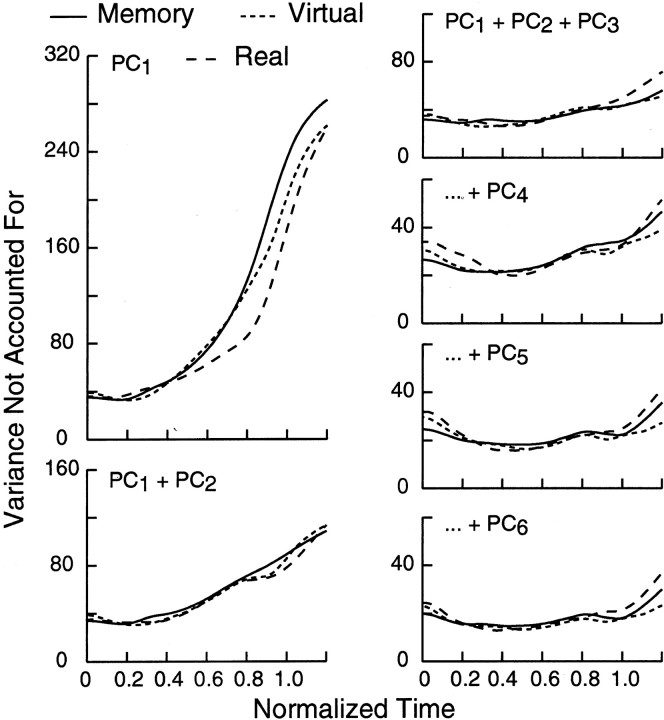
This study was aimed at describing temporal synergies of hand movement and determining the influence of sensory cues on the control of these synergies. Subjects were asked to reach to and grasp various objects under three experimental conditions: (1) memory-guided movements, in which the object was not in view during the movement; (2) virtual object, in which a virtual image of the object was in view but the object was not physically present; and (3) real object, in which the object was in view and physically present. Motion of the arm and of 15 degrees of freedom of the hand was recorded. A principal components analysis was developed to provide a concise description of the spatiotemporal patterns underlying the motion. Vision of the object during the reaching movement had no influence on the kinematics, and the effect of the physical presence of the object became manifest primarily after the fingers had contacted the object. Two principal components accounted for >75% of the variance. For both components, there was a strong positive correlation in the rotations of metacarpophalangeal and proximal interphalangeal joints of the fingers. The first principal component exhibited a pattern of finger extension reversing to flexion, whereas the second principal component became important only in the second half of the reaching movement.
Figures
References
-
- Batista AP, Buneo CA, Snyder LH, Andersen RA. Reach plans in eye-centered coordinates. Science. 1999;285:257–260. - PubMed
-
- Chieffi S, Gentilucci M. Coordination between the transport and the grasp components during prehension movements. Exp Brain Res. 1993;94:471–477. - PubMed
-
- Crossman ERFW, Goodeve PJ. Feedback control of hand-movement and Fitts' Law. Q J Exp Psychol A. 1983;35:251–278. - PubMed
-
- Desmurget M, Pélisson D, Rosetti Y, Prablanc C. From eye to hand: planning goal-directed movements. Neurosci Biobehav Rev. 1998;22:761–788. - PubMed
-
- Georgopoulos AP. On reaching. Annu Rev Neurosci. 1986;9:147–170. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources