

Inverting dynamic force microscopy: from signals to time-resolved interaction forces
- PMID: 12070341
- PMCID: PMC124277
- DOI: 10.1073/pnas.122040599
Inverting dynamic force microscopy: from signals to time-resolved interaction forces
Abstract
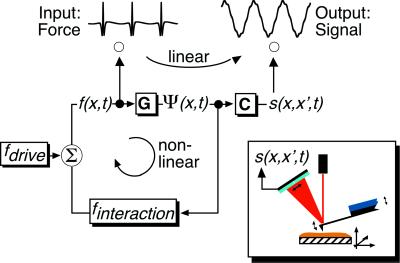
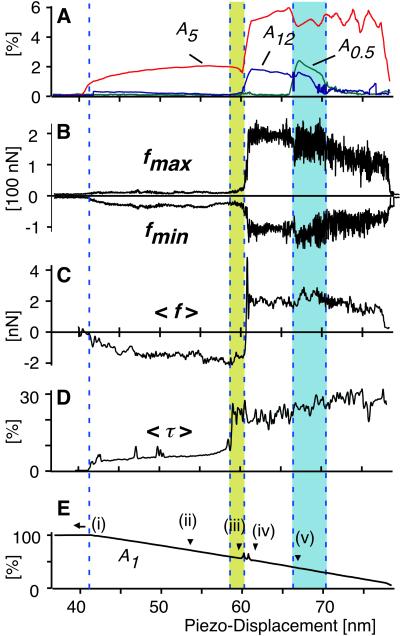
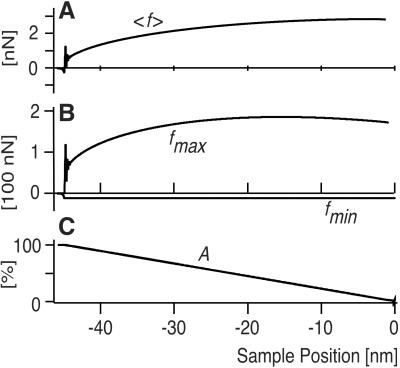
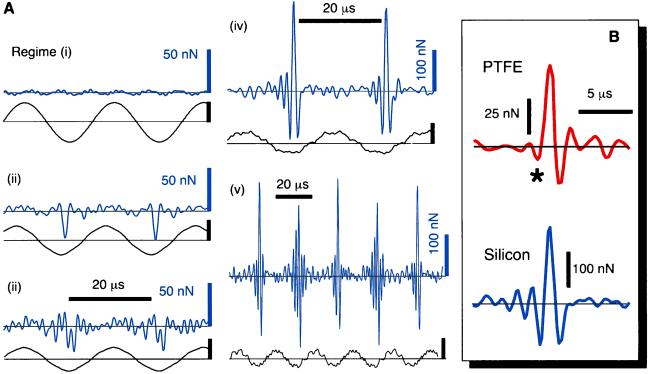
Transient forces between nanoscale objects on surfaces govern friction, viscous flow, and plastic deformation, occur during manipulation of matter, or mediate the local wetting behavior of thin films. To resolve transient forces on the (sub) microsecond time and nanometer length scale, dynamic atomic force microscopy (AFM) offers largely unexploited potential. Full spectral analysis of the AFM signal completes dynamic AFM. Inverting the signal formation process, we measure the time course of the force effective at the sensing tip. This approach yields rich insight into processes at the tip and dispenses with a priori assumptions about the interaction, as it relies solely on measured data. Force measurements on silicon under ambient conditions demonstrate the distinct signature of the interaction and reveal that peak forces exceeding 200 nN are applied to the sample in a typical imaging situation. These forces are 2 orders of magnitude higher than those in covalent bonds.
Figures
References
-
- Ferry J D. Viscoelastic Properties of Polymers. New York: Wiley; 1980.
-
- Wilhelm M. Macromol Mater Eng. 2002;287:83–105.
-
- Binnig G, Quate C F, Gerber C. Phys Rev Lett. 1986;56:930–933. - PubMed
-
- Friedbacher G, Fuchs H. Pure Appl Chem. 1999;71:1337–1357.
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
Miscellaneous
