

Stretch reflex gain in cat triceps surae muscles with compliant loads
- PMID: 12482905
- PMCID: PMC2290714
- DOI: 10.1113/jphysiol.2002.027177
Stretch reflex gain in cat triceps surae muscles with compliant loads
Abstract
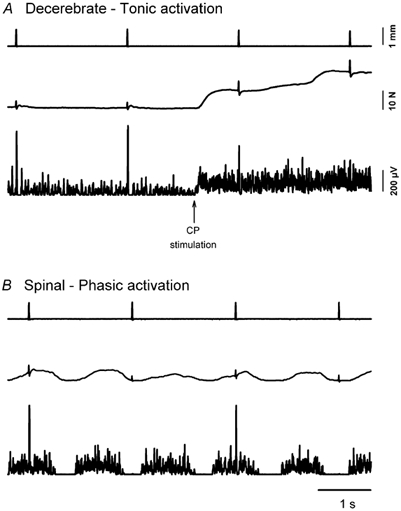
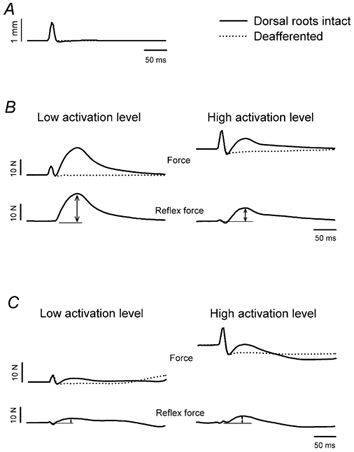
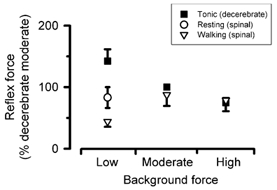
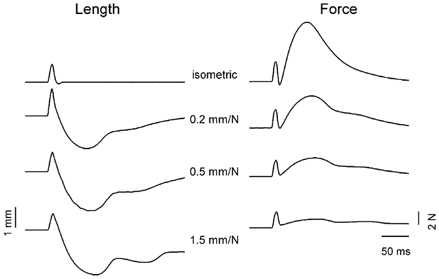
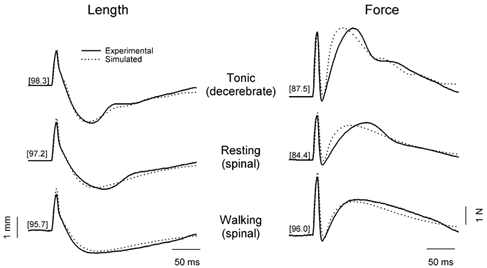
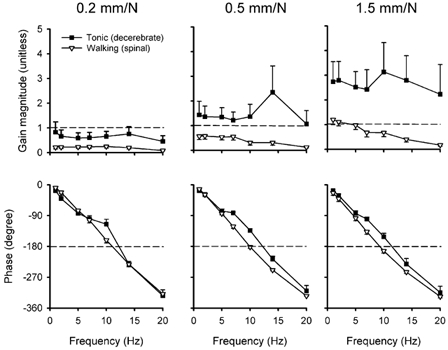
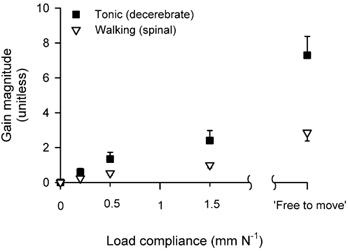
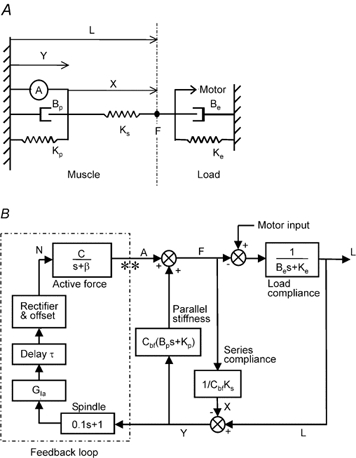
The triceps surae (TS) stretch reflex was measured in decerebrate cats during crossed extensor stimulation (tonic contractions) and after spinalization during rhythmic locomotor activity. The TS reflex force in response to a short pulse stretch measured during tonic contractions at low level of background activity was greater than when more background activity was present at the time of application of stretch. In contrast, the reflex force measured during rhythmic contractions was very small at low level of background force (flexion phase) and increased at moderate and high levels of background activity (extension phase). Thus, even in reduced preparations, a task modulation of the stretch reflex occurs. Throughout the experimental procedure, the torque motor used to stretch the muscles behaved like a spring of a preset compliance (from isometric to very compliant). A reflex model was used to simulate the responses obtained experimentally. The gain of the stretch reflex loop was estimated for each load condition and both behavioural tasks. The reflex loop gain was significantly larger as the compliance of the external load increased for both tonic and rhythmic contractions, although to a lesser extent in the phasically activated muscles. During rhythmic locomotor contractions the gain was less than 1, assuring stability of the system. In contrast, during tonic contractions against a compliant load the gain exceeded 1, consistent with the instability (oscillations, clonus) seen at times under these load conditions. However, the high gain and instability was only transient, since repeated stretch reduced the gain. Thus, non-linearities in the system assured vigorous responses at the onset of perturbations, but then weaker responses to ongoing perturbations to reduce the chance of feedback instability (clonus).
Figures
References
-
- Allum JHJ, Mauritz K-H. Compensation for intrinsic muscle stiffness by short-latency reflexes in human triceps surae muscles. Journal of Neurophysiology. 1984;52:797–818. - PubMed
-
- Bässler U. Neural Basis of Elementary Behavior in Stick Insects. Berlin: Springer-Verlag; 1983.
-
- Bawa P, Mannard A, Stein RB. Effects of elastic loads on the contractions of cat muscles. Biological Cybernetics. 1976a;22:129–137. - PubMed
-
- Bawa P, Mannard A, Stein RB. Predictions and experimental tests of a visco-elastic and inertial loads. Biological Cybernetics. 1976b;22:139–145. - PubMed
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Miscellaneous