

System identification applied to a visuomotor task: near-optimal human performance in a noisy changing task
- PMID: 12684493
- PMCID: PMC6742112
- DOI: 10.1523/JNEUROSCI.23-07-03066.2003
System identification applied to a visuomotor task: near-optimal human performance in a noisy changing task
Abstract
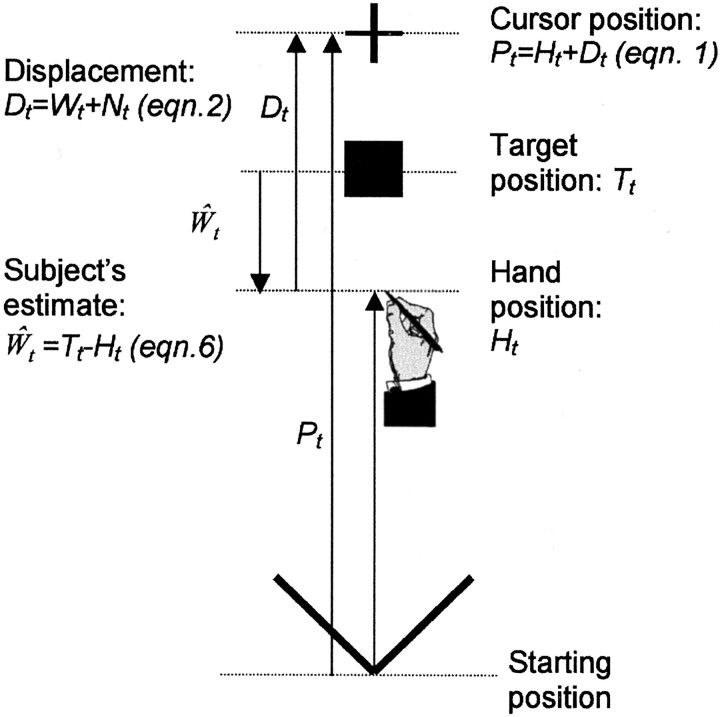
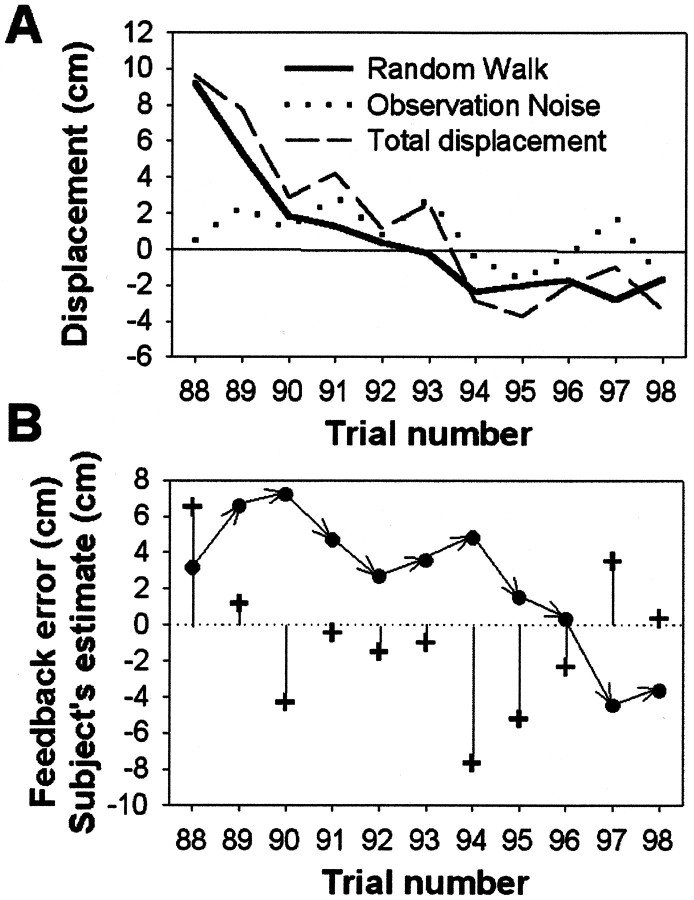
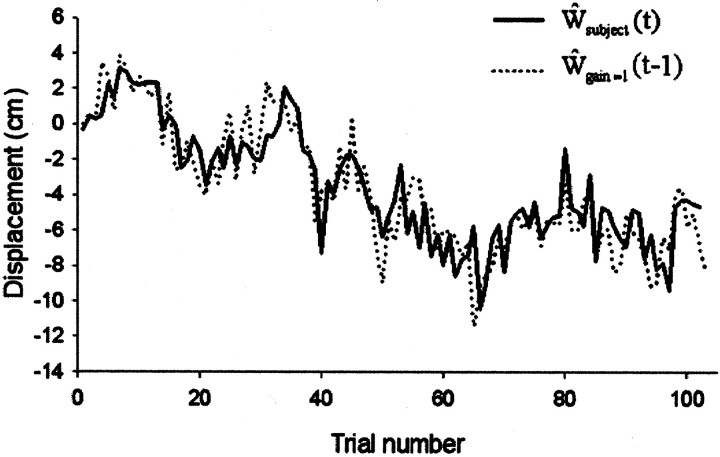
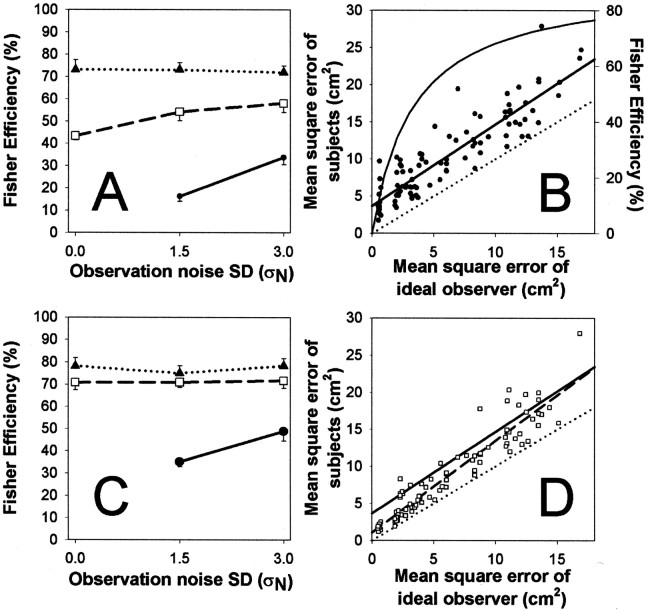
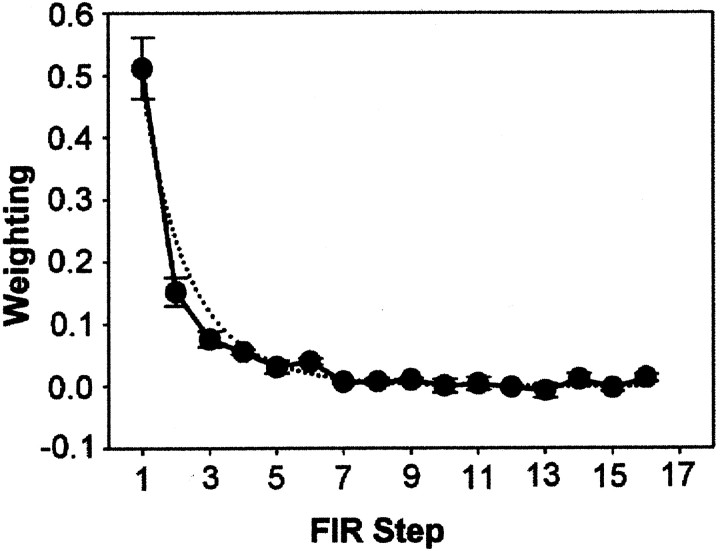
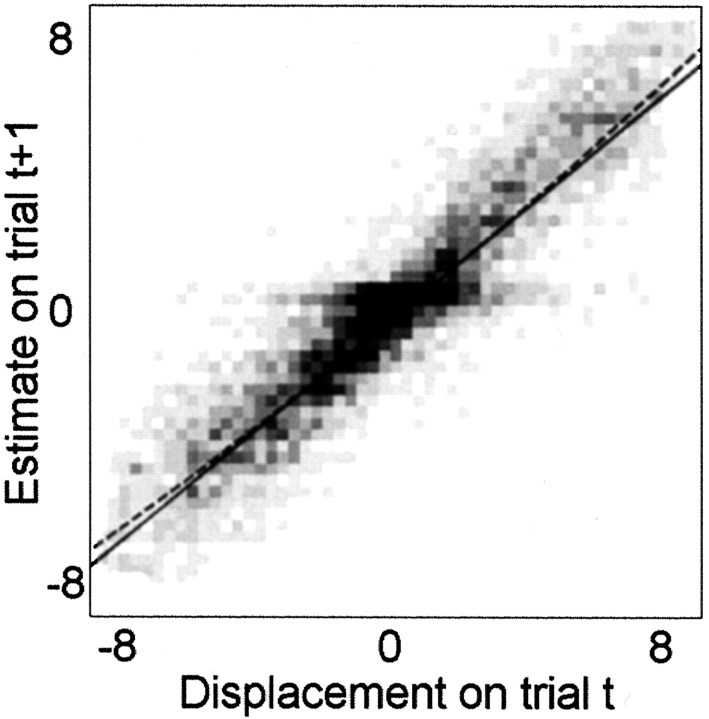
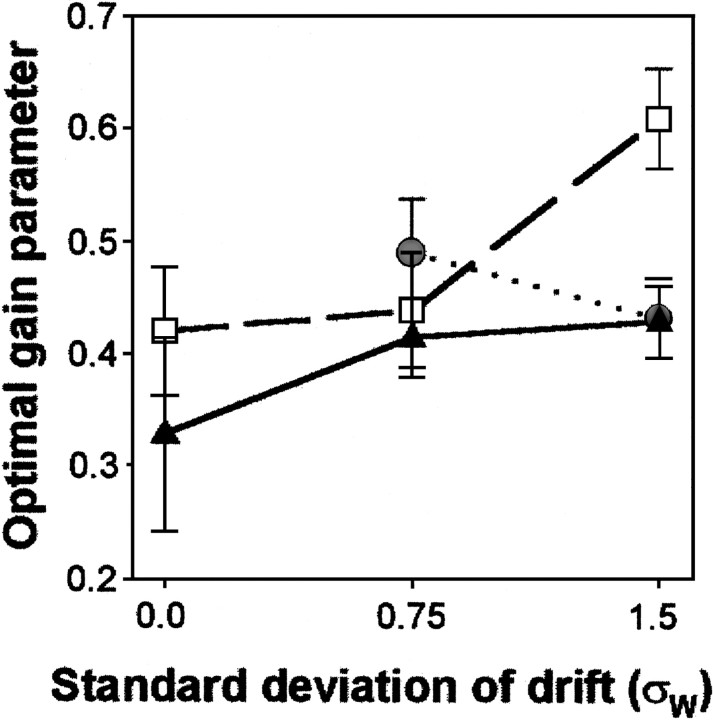
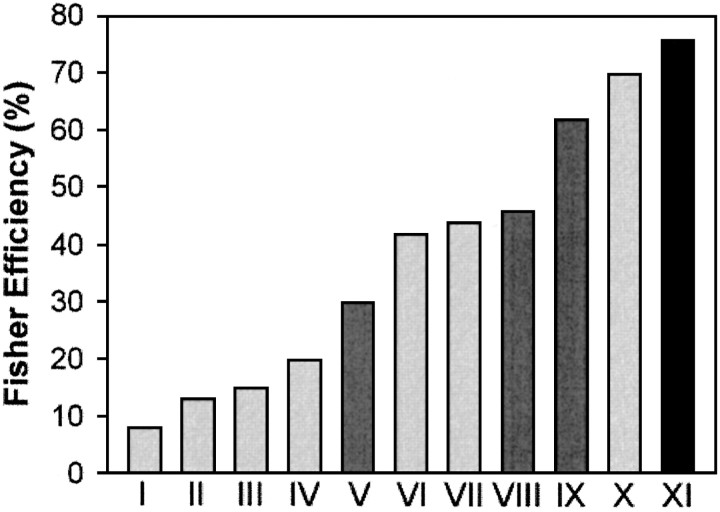
Sensory-motor integration has frequently been studied using a single-step change in a control variable such as prismatic lens angle and has revealed human visuomotor adaptation to often be partial and inefficient. We propose that the changes occurring in everyday life are better represented as the accumulation of many smaller perturbations contaminated by measurement noise. We have therefore tested human performance to random walk variations in the visual feedback of hand movements during a pointing task. Subjects made discrete targeted pointing movements to a visual target and received terminal feedback via a cursor the position of which was offset from the actual movement endpoint by a random walk element and a random observation element. By applying ideal observer analysis, which for this task compares human performance against that of a Kalman filter, we show that the subjects' performance was highly efficient with Fisher efficiencies reaching 73%. We then used system identification techniques to characterize the control strategy used. A "modified" delta-rule algorithm best modeled the human data, which suggests that they estimated the random walk perturbation of feedback in this task using an exponential weighting of recent errors. The time constant of the exponential weighting of the best-fitting model varied with the rate of random walk drift. Because human efficiency levels were high and did not vary greatly across three levels of observation noise, these results suggest that the algorithm the subjects used exponentially weighted recent errors with a weighting that varied with the level of drift in the task to maintain efficient performance.
Figures
References
-
- Akaike H. A new look at the statistical model identication. IEEE Trans AC. 1974;19:716–723.
-
- Baddeley RJ, Tripathy S. Insights into motion perception by observer modelling. J Opt Soc Am [A] 1998;15:289–296. - PubMed
-
- Berg BG. Observer efficiency and weights in a multiple observation task. J Acoust Soc Am. 1990;88:149–158. - PubMed
-
- Borah J, Young LR, Curry RE. Optimal estimator model for human spatial orientation. Ann NY Acad Sci. 1988;545:51–73. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources