

A natural class of robust networks
- PMID: 12853565
- PMCID: PMC166377
- DOI: 10.1073/pnas.1536783100
A natural class of robust networks
Abstract
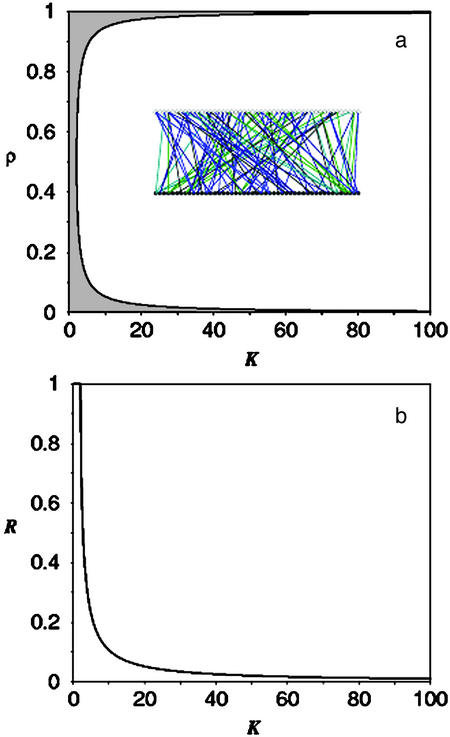
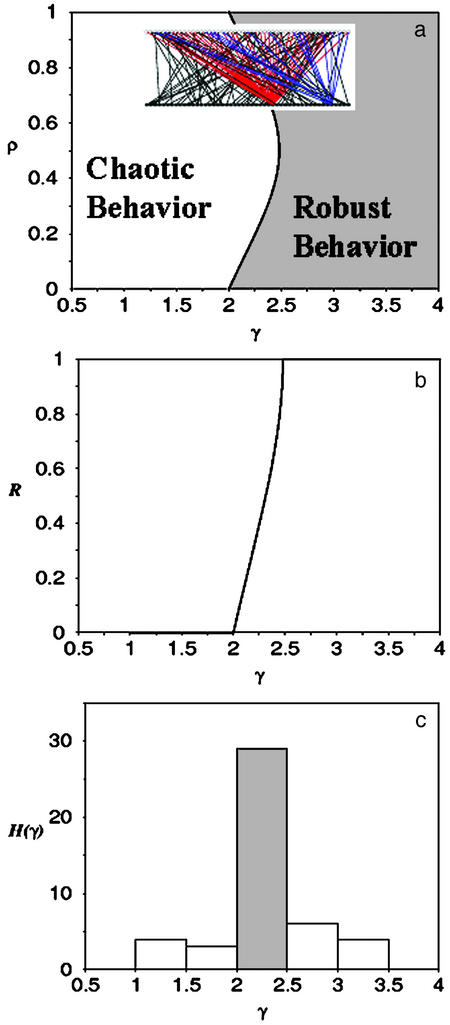
As biological studies shift from molecular description to system analysis we need to identify the design principles of large intracellular networks. In particular, without knowing the molecular details, we want to determine how cells reliably perform essential intracellular tasks. Recent analyses of signaling pathways and regulatory transcription networks have revealed a common network architecture, termed scale-free topology. Although the structural properties of such networks have been thoroughly studied, their dynamical properties remain largely unexplored. We present a prototype for the study of dynamical systems to predict the functional robustness of intracellular networks against variations of their internal parameters. We demonstrate that the dynamical robustness of these complex networks is a direct consequence of their scale-free topology. By contrast, networks with homogeneous random topologies require fine-tuning of their internal parameters to sustain stable dynamical activity. Considering the ubiquity of scale-free networks in nature, we hypothesize that this topology is not only the result of aggregation processes such as preferential attachment; it may also be the result of evolutionary selective processes.
Figures

References
-
- Hartwell, L. H., Hopfield, J. J., Leibler, S. & Murray, A. W. (1999) Nature 402, C47–C52. - PubMed
-
- Kitano, H. (2002) Science 295, 1662–1664. - PubMed
-
- Ideker, T., Thorsson, V., Ranish, J. A., Christmas, R., Buhler, J., Eng, J. K., Bumgarner, R., Goodlett, D. R., Aebersold, R. & Hood, L. (2001) Science 292, 929–934. - PubMed
-
- Savageau, M. A. (1971) Nature 229, 542–544. - PubMed
-
- Savageau, M. A. (1975) Nature 258, 208–214. - PubMed
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Research Materials
