

Force- and moment-generating capacities of muscles in the distal forelimb of the horse
- PMID: 12892409
- PMCID: PMC1571149
- DOI: 10.1046/j.1469-7580.2003.00206.x
Force- and moment-generating capacities of muscles in the distal forelimb of the horse
Abstract
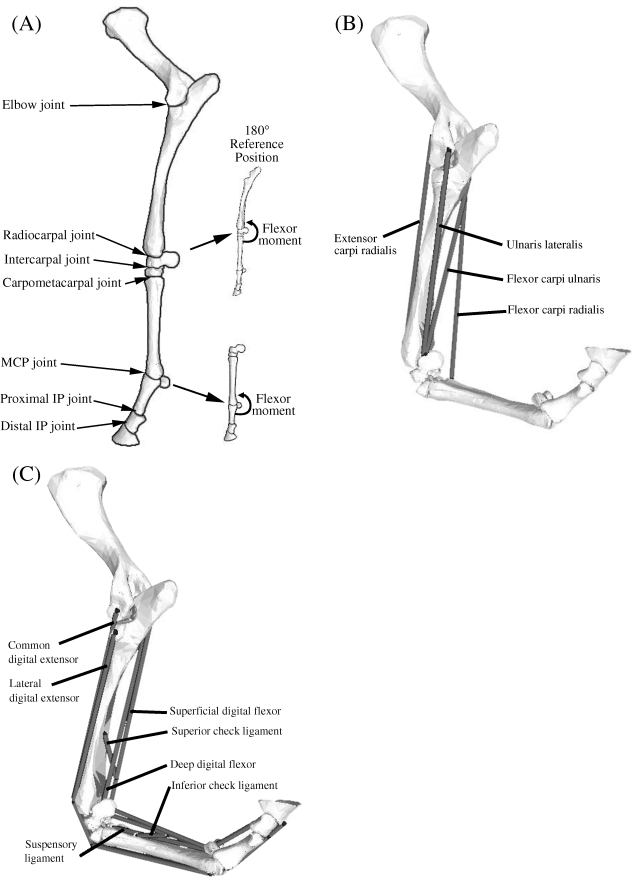
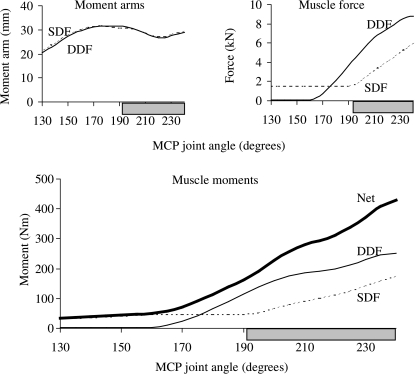
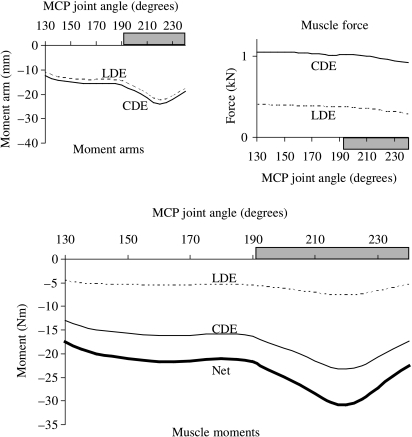
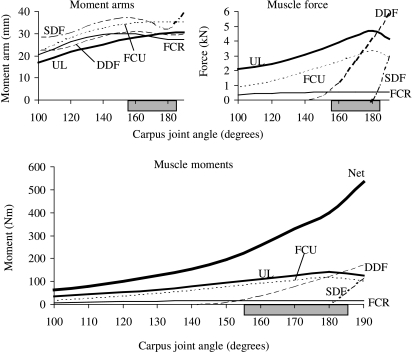
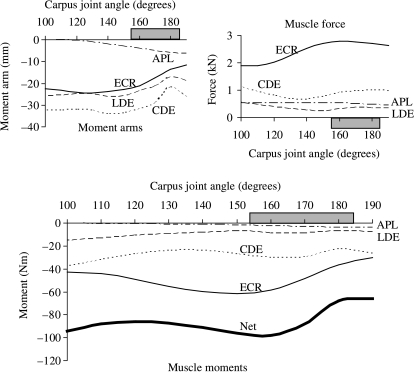
A detailed musculoskeletal model of the distal equine forelimb was developed to study the influence of musculoskeletal geometry (i.e. muscle paths) and muscle physiology (i.e. force-length properties) on the force- and moment-generating capacities of muscles crossing the carpal and metacarpophalangeal joints. The distal forelimb skeleton was represented as a five degree-of-freedom kinematic linkage comprised of eight bones (humerus, radius and ulna combined, proximal carpus, distal carpus, metacarpus, proximal phalanx, intermediate phalanx and distal phalanx) and seven joints (elbow, radiocarpal, intercarpal, carpometacarpal, metacarpophalangeal (MCP), proximal interphalangeal (pastern) and distal interphalangeal (coffin)). Bone surfaces were reconstructed from computed tomography scans obtained from the left forelimb of a Thoroughbred horse. The model was actuated by nine muscle-tendon units. Each unit was represented as a three-element Hill-type muscle in series with an elastic tendon. Architectural parameters specifying the force-producing properties of each muscle-tendon unit were found by dissecting seven forelimbs from five Thoroughbred horses. Maximum isometric moments were calculated for a wide range of joint angles by fully activating the extensor and flexor muscles crossing the carpus and MCP joint. Peak isometric moments generated by the flexor muscles were an order of magnitude greater than those generated by the extensor muscles at both the carpus and the MCP joint. For each flexor muscle in the model, the shape of the maximum isometric joint moment-angle curve was dominated by the variation in muscle force. By contrast, the moment-angle curves for the muscles that extend the MCP joint were determined mainly by the variation in muscle moment arms. The suspensory and check ligaments contributed more than half of the total support moment developed about the MCP joint in the model. When combined with appropriate in vivo measurements of joint kinematics and ground-reaction forces, the model may be used to determine muscle-tendon and joint-reaction forces generated during gait.
Figures
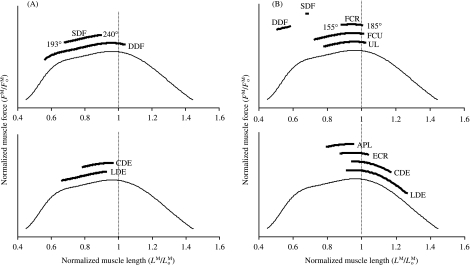
 ) for each muscle in the model (vertical axis). Note that at a muscle length of
) for each muscle in the model (vertical axis). Note that at a muscle length of  , muscle force equals . In all panels, the thin line is the standardized force–length curve used to calculate muscle force. (A) Muscles acting about the MCP joint were predicted to operate slightly below their optimal fibre length at the joint angles associated with the stance phase of gait. Thus, if the MCP joint was moved to joint angles beyond 240°, e.g. as in galloping (Butcher & Ashley-Ross, 2002), the superficial and deep digital flexor muscles would probably remain close to their optimal lengths. The joint range of motion for the MCP joint in walking and trotting is reported to be between 193° and 240° (van Weeren et al. 1993; Hodson et al. 2000). (B) At the carpus, the superficial and deep digital flexor muscles in the model operated at less than 0.74 for the joint angles associated with the stance phase of gait. The other carpal extensor and flexor muscles were estimated to be near their optimal lengths. The joint range of motion for the carpus in walking and trotting is reported to be between 155° and 185° (van Weeren et al. 1993; Hodson et al. 2000). Note that CDE, LDE, SDF and DDF all cross both the carpus and the MCP joint.
, muscle force equals . In all panels, the thin line is the standardized force–length curve used to calculate muscle force. (A) Muscles acting about the MCP joint were predicted to operate slightly below their optimal fibre length at the joint angles associated with the stance phase of gait. Thus, if the MCP joint was moved to joint angles beyond 240°, e.g. as in galloping (Butcher & Ashley-Ross, 2002), the superficial and deep digital flexor muscles would probably remain close to their optimal lengths. The joint range of motion for the MCP joint in walking and trotting is reported to be between 193° and 240° (van Weeren et al. 1993; Hodson et al. 2000). (B) At the carpus, the superficial and deep digital flexor muscles in the model operated at less than 0.74 for the joint angles associated with the stance phase of gait. The other carpal extensor and flexor muscles were estimated to be near their optimal lengths. The joint range of motion for the carpus in walking and trotting is reported to be between 155° and 185° (van Weeren et al. 1993; Hodson et al. 2000). Note that CDE, LDE, SDF and DDF all cross both the carpus and the MCP joint.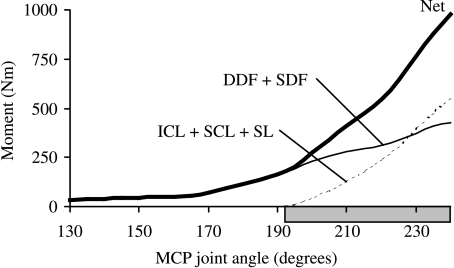
References
-
- Alexander GR, Gibson KT, Day RE, Robertson ID. Effects of superior check desmotomy on flexor tendon and suspensory ligament strain in equine cadaver limbs. Vet. Surg. 2001;30:522–527. - PubMed
-
- Alexander RMcN. Elastic Mechanisms in Animal Movement. Cambridge: Cambridge University Press; 1988.
-
- Andrews FW, Spurgeon TL. Histochemical staining characteristics of normal skeletal muscle. Am. J. Vet. Res. 1986;47:1843–1852. - PubMed
-
- Bartel DL, Schryver HF, Lowe JE, Parker RA. Locomotion in the horse: procedure for computing the internal forces in the digit. Am. Vet. J. Res. 1978;39:1721–1727. - PubMed
-
- Biewener AA. Muscle-tendon stresses and elastic energy storage during locomotion in the horse. Comp. Biochem. Physiol. B. 1998;120:73–87. - PubMed
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Miscellaneous
