

Multisensory integration during motor planning
- PMID: 12904459
- PMCID: PMC6740676
- DOI: 10.1523/JNEUROSCI.23-18-06982.2003
Multisensory integration during motor planning
Abstract
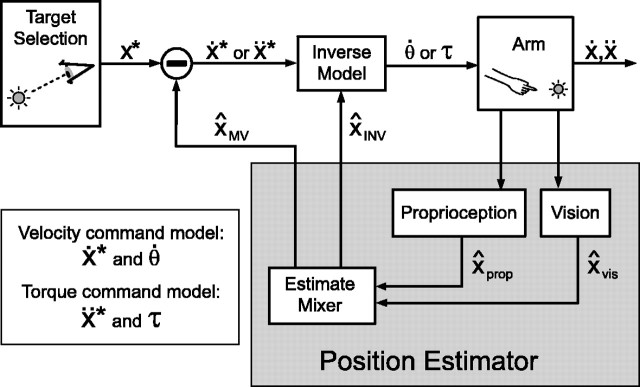
When planning goal-directed reaches, subjects must estimate the position of the arm by integrating visual and proprioceptive signals from the sensory periphery. These integrated position estimates are required at two stages of motor planning: first to determine the desired movement vector, and second to transform the movement vector into a joint-based motor command. We quantified the contributions of each sensory modality to the position estimate formed at each planning stage. Subjects made reaches in a virtual reality environment in which vision and proprioception were dissociated by shifting the location of visual feedback. The relative weighting of vision and proprioception at each stage was then determined using computational models of feedforward motor control. We found that the position estimate used for movement vector planning relies mostly on visual input, whereas the estimate used to compute the joint-based motor command relies more on proprioceptive signals. This suggests that when estimating the position of the arm, the brain selects different combinations of sensory input based on the computation in which the resulting estimate will be used.
Figures
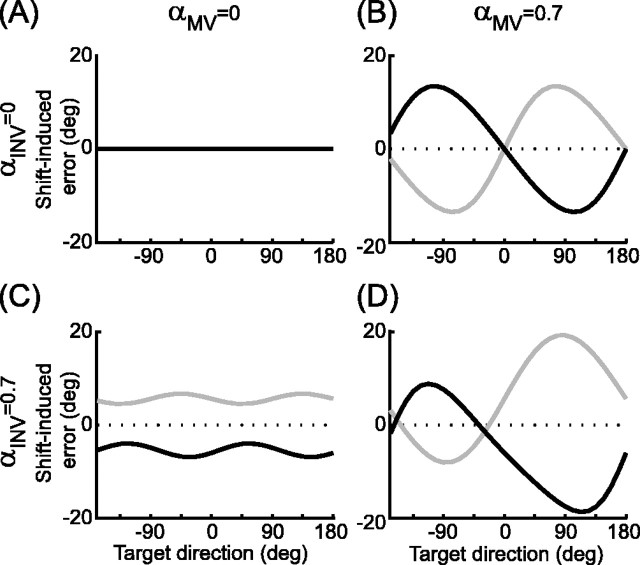
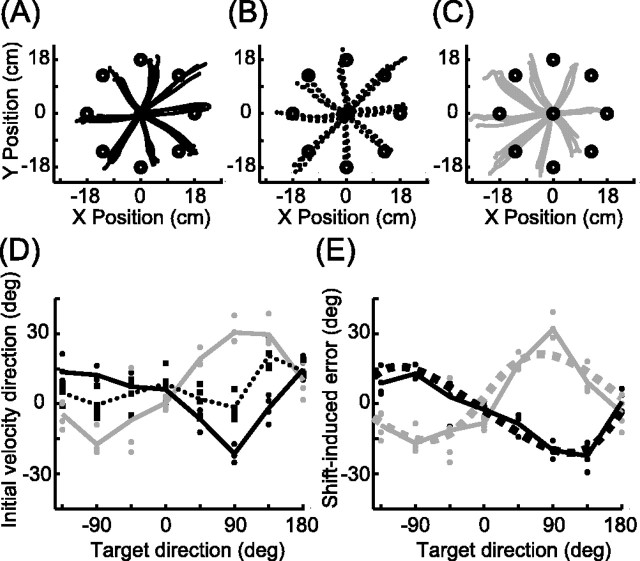
 , gray line) trials. E, Shift-induced error as function of target direction. Dashed lines represent the errors predicted by the best-fit velocity-command model (αMV = 0.97, αINV = 0.34). Other symbols as in D.
, gray line) trials. E, Shift-induced error as function of target direction. Dashed lines represent the errors predicted by the best-fit velocity-command model (αMV = 0.97, αINV = 0.34). Other symbols as in D.
References
-
- Aglioti S, DeSouza JFX, Goodale MA ( 1995) Size-contrast illusions deceive the eye but not the hand. Curr Biol 5: 679-685. - PubMed
-
- Andersen RA, Snyder LH, Bradley DC, Xing J ( 1997) Multimodal representation of space in the posterior parietal cortex and its use in planning movements. Ann Rev Neurosci 20: 303-330. - PubMed
-
- Buneo CA, Jarvis MR, Batista AP, Andersen RA ( 2002) Direct visuomotor transformations for reaching. Nature 416: 632-636. - PubMed
-
- Cheney PD, Fetz EE ( 1980) Functional classes of primate corticomotoneuronal cells and their relation to active force. J Neurophysiol 44: 773-791. - PubMed
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Medical