

Movement speed effects on limb position drift
- PMID: 12928763
- PMCID: PMC10709820
- DOI: 10.1007/s00221-003-1601-7
Movement speed effects on limb position drift
Abstract
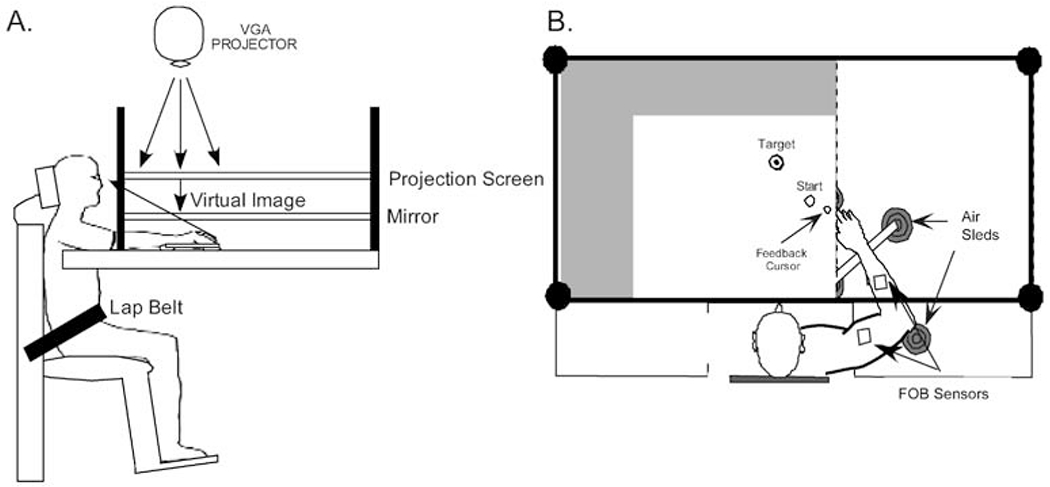
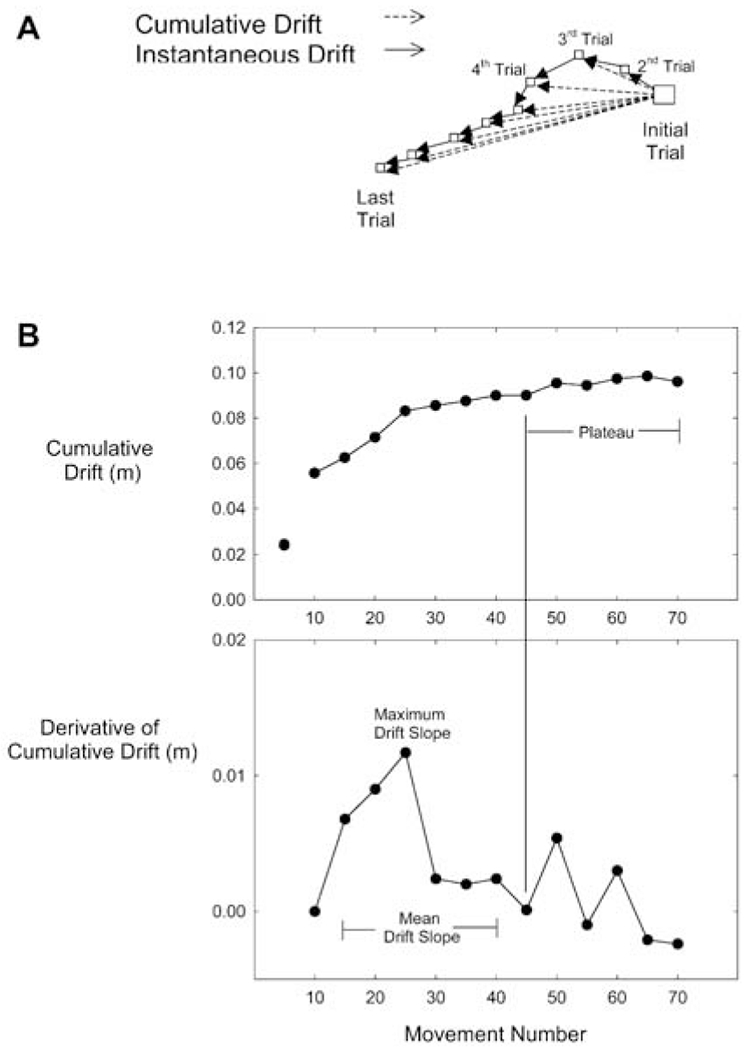
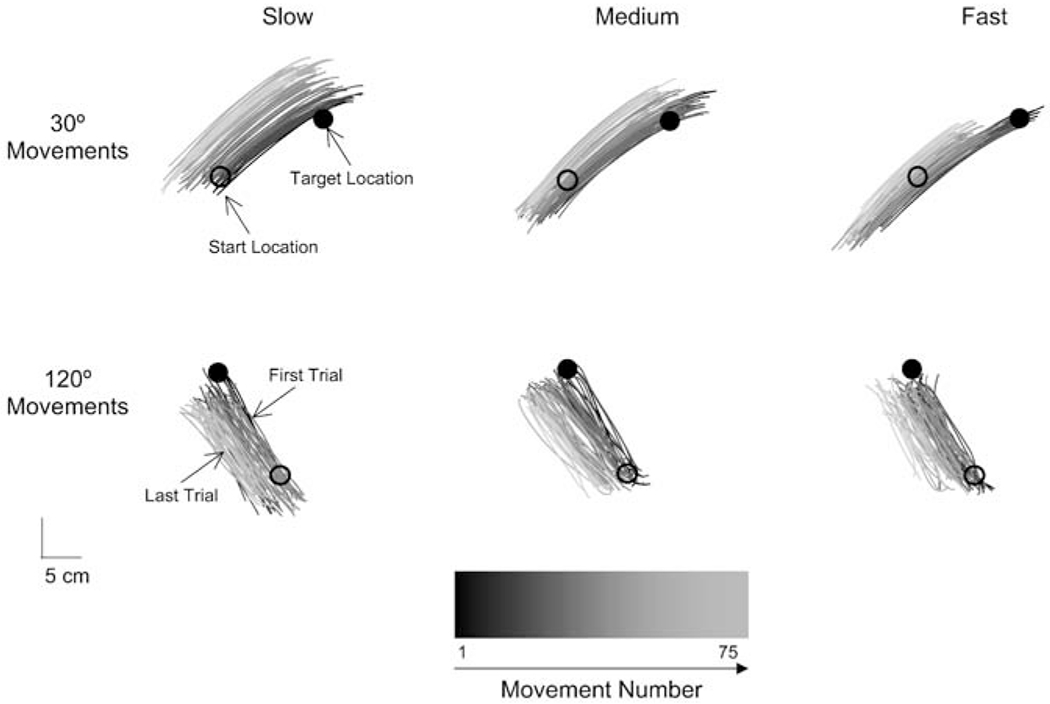
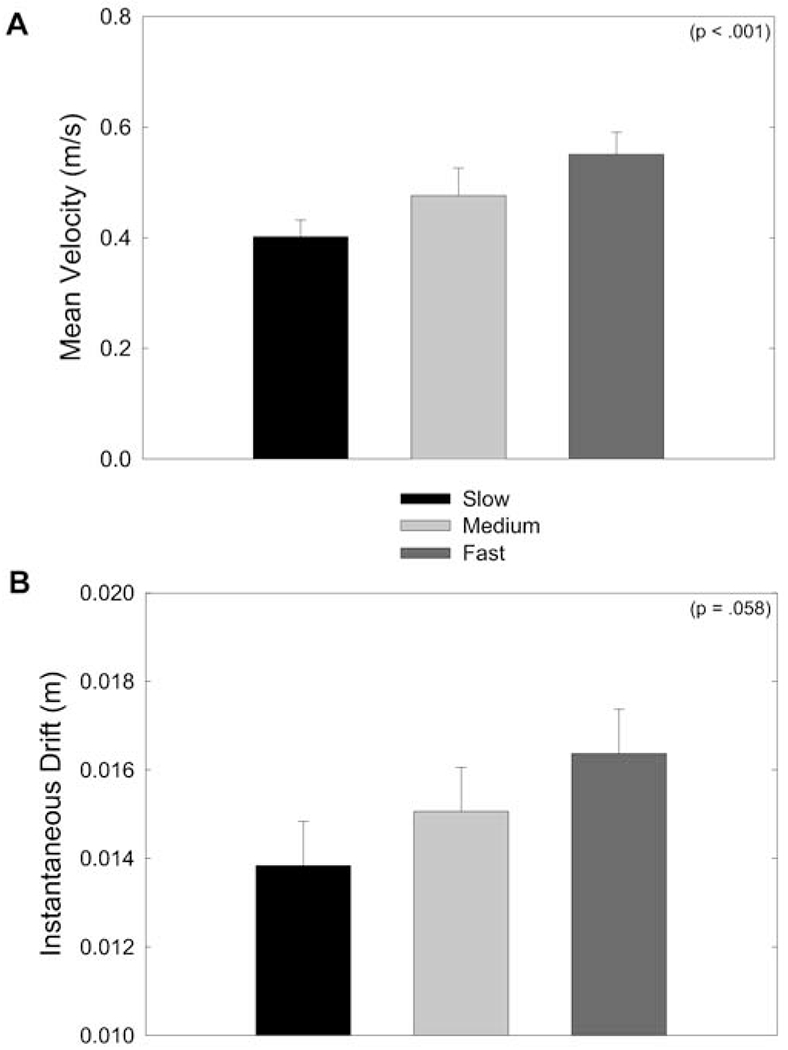
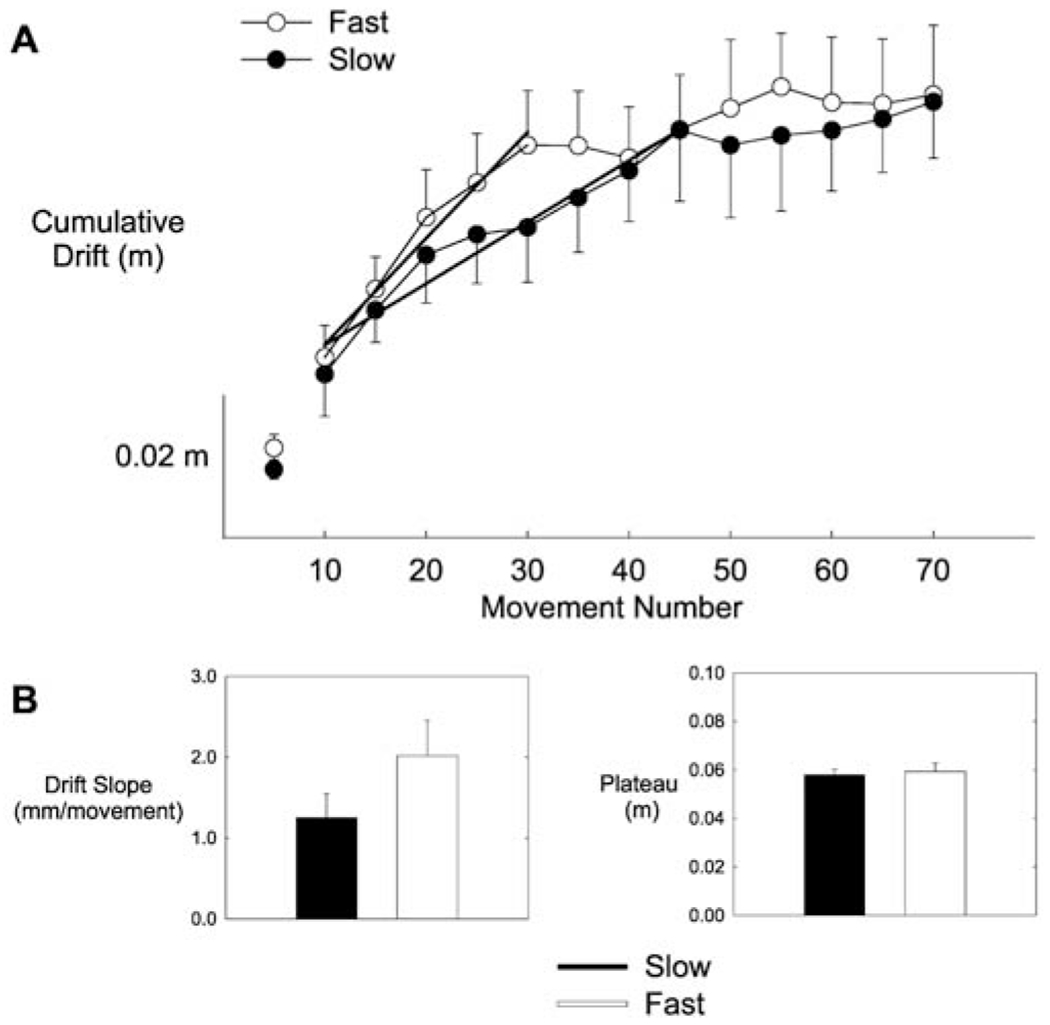
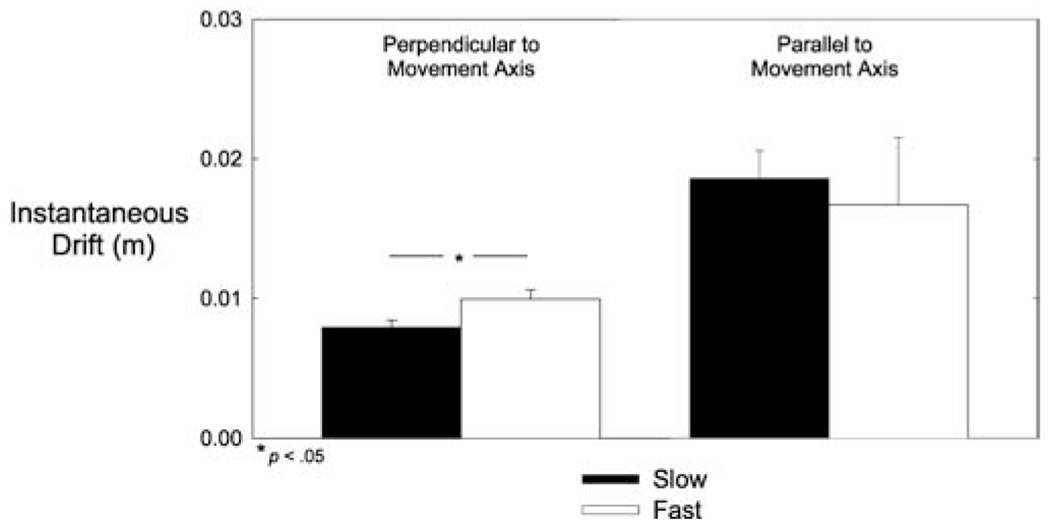
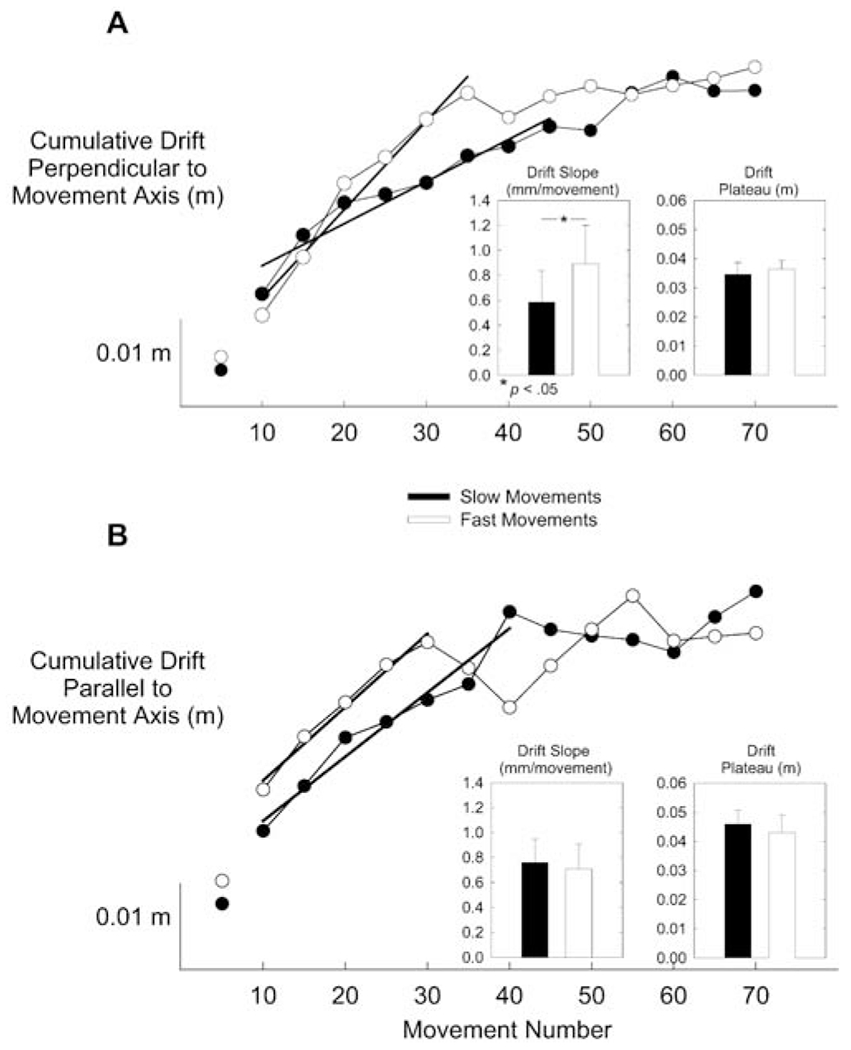
Previous research has shown that even when limb position drifts considerably during continuous blind performance, the topological and metrical properties of generated hand paths remain remarkably invariant. We tested two possible accounts of this intriguing effect. According to one hypothesis, position drift is due to degradation of limb-position information. This hypothesis predicted that drift of static hand positions at movement reversals should not depend on movement speed. According to the other hypothesis, position drift is due to degradation of movement information. This hypothesis predicted that drift of static hand positions at movement reversals should vary with movement speed. We tested these two hypotheses by varying the required movement speed when normal human adults performed back-and-forth manual positioning movements in the absence of visual feedback. Movement distance and direction were well preserved even though hand positions between movements drifted considerably. In accord with the movement error hypothesis, but not in accord with the position hypothesis, the rate at which hand positions drifted depended on movement speed. The data are consistent with the idea that hand position, which defines the origin of the trajectory control coordinate system, and movement trajectory are controlled by distinct neural mechanisms.
Figures
References
-
- Adams HF(1912) Autokinetic sensations. Psychol Monogr 14:1–45
-
- Bock O, Arnold K (1993) Error accumulation and error correction in sequential pointing movements. Exp Brain Res 95:111–117 - PubMed
-
- Bock O, Eckmiller R (1986) Goal directed arm movements in absence of visual guidance: evidence for amplitude rather than position control. Exp Brain Res 62:451–458 - PubMed
-
- Bock O, Dose M, Ott D, Eckmiller R (1990) Control of arm movements in a 2-dimensional pointing task. Behav Brain Res 40:247–250 - PubMed
-
- Brown LE, Rosenbaum DA (2001) Coordinate systems for movement planning: evidence from positional drift. Psychon Soc Abstr 6:16
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Medical
