

Human ability to scale and discriminate forces typical of those occurring during grasp and manipulation
- PMID: 15056719
- PMCID: PMC6730021
- DOI: 10.1523/JNEUROSCI.4822-03.2004
Human ability to scale and discriminate forces typical of those occurring during grasp and manipulation
Abstract
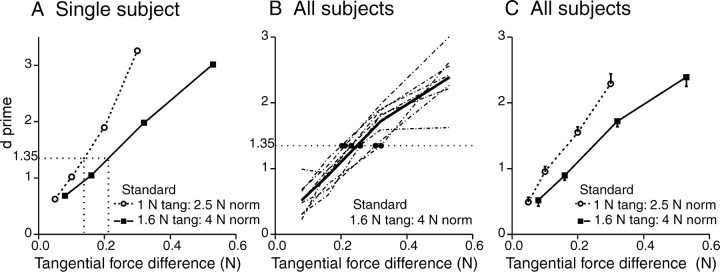
When humans manipulate objects, the sensorimotor system coordinates three-dimensional forces to optimize and maintain grasp stability. To do this, the CNS requires precise information about the magnitude and direction of load force (tangential to skin surface) plus feedback about grip force (normal to skin). Previous studies have shown that there is rapid, precise coordination between grip and load forces that deteriorates with digital nerve block. Obviously, mechanoreceptive afferents innervating fingerpad skin contribute essential information. We quantify human capacity to scale tangential and normal forces using only cutaneous information. Our paradigm simulated natural manipulations (a force tangential to the skin superimposed on an indenting force normal to the skin). Precisely controlled forces were applied by a custom-built stimulator to an immobilized fingerpad. Using magnitude estimation, subjects (n = 8) scaled the magnitude of tangential force (0.25-2.8 N) in two experiments (normal force, 2.5 and 4 N, respectively). Performance was unaffected by normal force magnitude and tangential force direction. Moreover, when both normal (2-4 N) and tangential forces were varied in a randomized-block factorial design, the relationship between applied and perceived tangential force remained near linear, with a minor but statistically significant nonlinearity. Our subjects could also discriminate small differences in tangential force, and this was the case for two different reference stimuli. In both cases, the Weber fraction was 0.16. Finally, scaling functions for magnitude estimates of normal force (1-5 N) were also approximately linear. These data show that the cutaneous afferents provide a wealth of precise information about both normal and tangential force.
Figures






Similar articles
-
Cutaneous afferents from the monkeys fingers: responses to tangential and normal forces.J Neurophysiol. 2010 Feb;103(2):950-61. doi: 10.1152/jn.00502.2009. Epub 2009 Dec 2. J Neurophysiol. 2010. PMID: 19955296
-
Tangential torque effects on the control of grip forces when holding objects with a precision grip.J Neurophysiol. 1997 Sep;78(3):1619-30. doi: 10.1152/jn.1997.78.3.1619. J Neurophysiol. 1997. PMID: 9310447 Clinical Trial.
-
Visual and tactile information about object-curvature control fingertip forces and grasp kinematics in human dexterous manipulation.J Neurophysiol. 2000 Dec;84(6):2984-97. doi: 10.1152/jn.2000.84.6.2984. J Neurophysiol. 2000. PMID: 11110826 Clinical Trial.
-
Physiological characteristics of low-threshold mechanoreceptors in joints, muscle and skin in human subjects.Clin Exp Pharmacol Physiol. 2005 Jan-Feb;32(1-2):135-44. doi: 10.1111/j.1440-1681.2005.04143.x. Clin Exp Pharmacol Physiol. 2005. PMID: 15730450 Review.
-
Sensory input and control of grip.Novartis Found Symp. 1998;218:45-59; discussion 59-63. doi: 10.1002/9780470515563.ch4. Novartis Found Symp. 1998. PMID: 9949815 Review.
Cited by
-
A haptic illusion created by gravity.iScience. 2023 Jun 28;26(7):107246. doi: 10.1016/j.isci.2023.107246. eCollection 2023 Jul 21. iScience. 2023. PMID: 37485356 Free PMC article.
-
Human's Capability to Discriminate Spatial Forces at the Big Toe.Front Neurorobot. 2018 Apr 10;12:13. doi: 10.3389/fnbot.2018.00013. eCollection 2018. Front Neurorobot. 2018. PMID: 29692718 Free PMC article.
-
Discriminability of multiple cutaneous and proprioceptive hand percepts evoked by intraneural stimulation with Utah slanted electrode arrays in human amputees.J Neuroeng Rehabil. 2021 Jan 21;18(1):12. doi: 10.1186/s12984-021-00808-4. J Neuroeng Rehabil. 2021. PMID: 33478534 Free PMC article.
-
Normal and tangential forces combine to convey contact pressure during dynamic tactile stimulation.Sci Rep. 2022 May 17;12(1):8215. doi: 10.1038/s41598-022-12010-0. Sci Rep. 2022. PMID: 35581308 Free PMC article.
-
Human ability to discriminate direction of three-dimensional force stimuli applied to the finger pad.J Neurophysiol. 2011 Feb;105(2):541-7. doi: 10.1152/jn.00322.2010. Epub 2010 Nov 24. J Neurophysiol. 2011. PMID: 21106897 Free PMC article.
References
-
- Augurelle AS, Smith AM, Lejeune T, Thonnard JL (2003) Importance of cutaneous feedback in maintaining a secure grip during manipulation of hand-held objects. J Neurophysiol 89: 665–671. - PubMed
-
- Bisley JW, Goodwin AW, Wheat HE (2000) Slowly adapting type I afferents from the sides and end of the finger respond to stimuli on the center of the fingerpad. J Neurophysiol 84: 57–64. - PubMed
-
- Cadoret G, Smith AM (1996) Friction, not texture, dictates grip forces used during object manipulation. J Neurophysiol 75: 1963–1969. - PubMed
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources