

Review
doi: 10.1097/00003677-200404000-00007.
Prehension synergies
Affiliations
- PMID: 15064652
- PMCID: PMC2821099
- DOI: 10.1097/00003677-200404000-00007
Item in Clipboard
Review
Prehension synergies
Exerc Sport Sci Rev.
2004 Apr.
Abstract
The precision grip requires the control of the normal and tangential forces exerted by the fingers as well as the control of the rotational equilibrium of the grasped object. Prehension synergies involve the conjoint changes in finger forces and moments during multifinger gripping tasks. Some of these adjustments are dictated by mechanics, whereas others are the result of a choice by the performer.
Figures
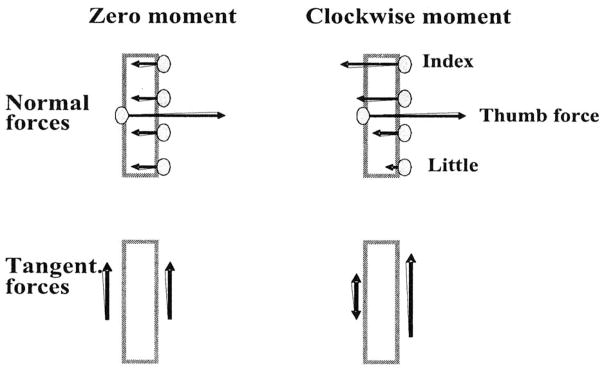
Schematic of digit forces at two different torques: (left) zero moment, (right) moment in a clockwise direction, (upper) normal forces, (bottom) tangential forces.
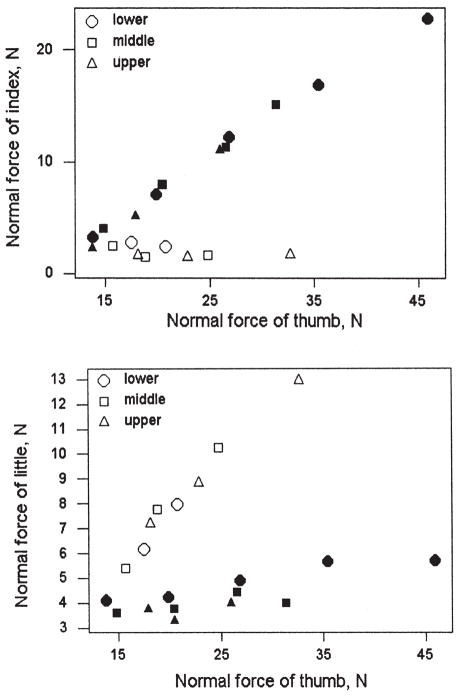
Relations between normal thumb forces and the fingers at various torque levels: (upper) index finger, (bottom) little finger. Filled symbols represent supination torques, and unfilled symbols represent pronation. Lower, middle, and upper refer to the different thumb positions. (Reprinted from Zatsiorsky, V. M., F. Gao, and M. L. Latash. Prehension synergies: effects of object geometry and prescribed torques. Exp. Brain Res. 148:77–87, 2003. Copyright © 2003 Springer-Verlag. Used with permission.)
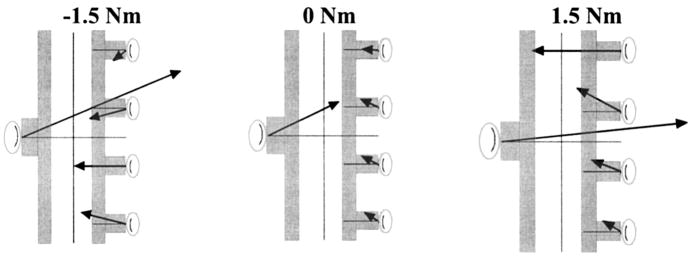
Force vectors at the digit tips, group average (N = 8). The pronation torque efforts are positive, and the supination torque efforts are negative. The digit force direction depends on the torque. Note that in some tasks, not all fingers support the load, for example, during the negative torque production (supination efforts), the index and middle fingers generate forces that are directed downward. The weight is supported only by the thumb and the little finger. In all cases, however, the finger forces contribute to the torque production. [Adapted from Zatsiorsky, V. M., F. Gao, and M. L. Latash. Finger force vectors in multi-finger prehension. J. Biomechanics 36:1745–1749, 2003. Copyright © 2003 Elsevier Ltd. Used with permission.]
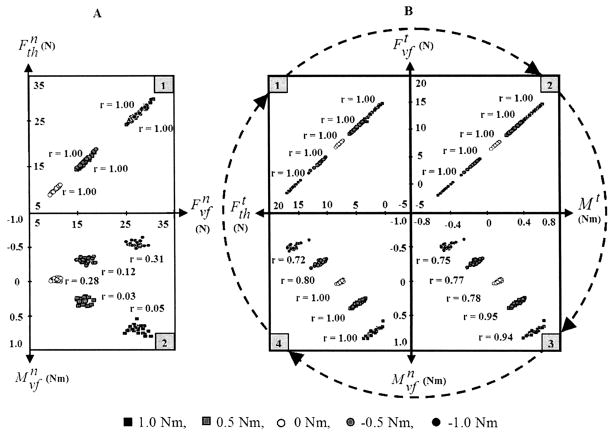
Interrelations among the experimental variables. Representative examples. F and M designate the force and moment; superscripts n and t refer to the normal and tangential force components; subscripts th and vf refer to the thumb and virtual finger, respectively. In the right panels, the arrows signify the sequence of events resulting in the high correlation between
and
(chain effects). Starting from the upper left panel (B-1) and moving consecutively along the arrows to B-2, B-3, and B-4, the reader can trace the chain effects explaining the correlation between
and
. (A-1)
are strongly correlated with
. (A-2)
are weakly correlated with
. (B-1)
versus
. The values of
and
lie o0n a straight line because
. The different location of
and
values along the straight line signifies the different magnitude of Mt. (B-2)
versus
. Because the sums
and
are constant, a change in one of these forces determines the difference between their values and, hence, the moment that these force produce. (B-3) Mt versus
. The relations are negative because the sum of the moment of the tangential forces Mt and the moment of the normal forces
must equal the resisted torque. (B-4)
versus
. As a consequence of the chain effects, the moments of the normal forces
are highly correlated with the thumb tangential forces
. (Reprinted from Zatsiorsky, V. M., M. L. Latash, F. Gao, and J. K. Shim. The principle of superposition in human prehension. Robotica, 2004 (In press). Copyright © 2004 Cambridge University Press. Used with permission.)
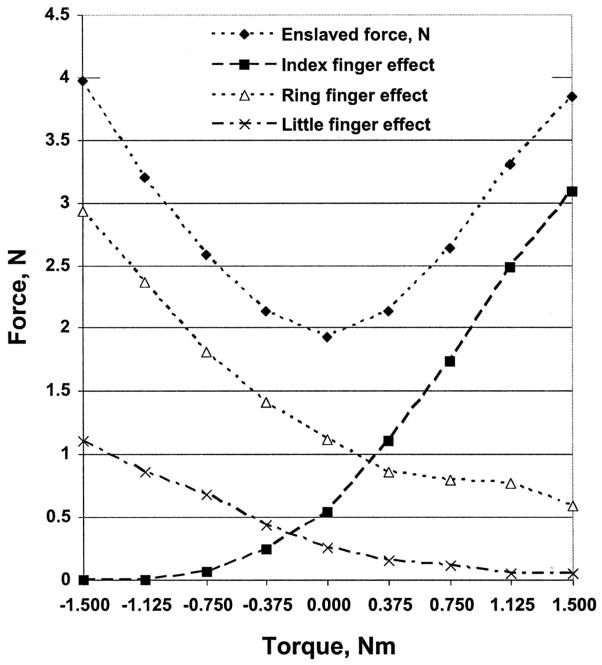
Decomposition of the enslaved force produced by the middle finger at the different magnitudes of the generated torque, from −1.5 Nm to 1.5 Nm (the load was 2.0 kg). A representative example. An enslaved force is the force generated by a finger resulting from the commands sent to other fingers. The total enslaved force of the middle finger is the sum of the enslaving effects from the commands to the index, ring, and little fingers. The enslaved force increased with the increase of the torque magnitude. [Adapted from Zatsiorsky, V. M., R. W. Gregory, and M. L. Latash. Force and torque production in static multi-finger prehension: biomechanics and control. II. Control. Biol. Cybern. 87:40 –49, 2002. Copyright © 2002 Cambridge University Press. Used with permission.]
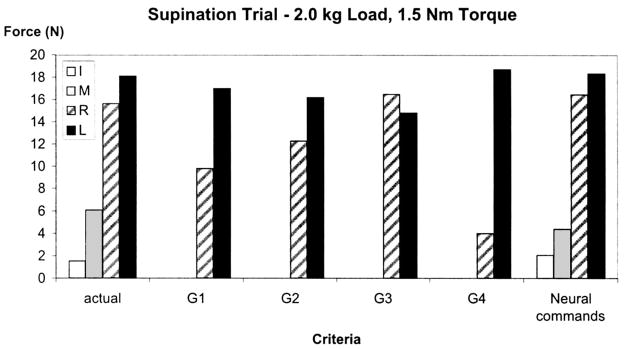
Comparison of actual force data with force patterns predicted by different optimization criteria. The norms of the following vectors were used as cost functions. (G1) Finger forces, N. (G2) Finger forces expressed in percent with respect to the maximal forces measured in single-finger tasks. (G3) Finger forces expressed in percent with respect to the maximal forces measured in four-finger tasks. (G4) Finger forces normalized with respect to the maximal moments that can be generated by the fingers while grasping an object with four fingers. Criteria G1, G2, G3, and G4 did not predict successfully the activation of the antagonist fingers, whereas optimization of the neural commands did. Hence, the objective function that accounted for the enslaving effects yielded better results. (Reprinted from Zatsiorsky, V. M., R. W. Gregory, and M. L. Latash. Force and torque production in static multi-finger prehension: biomechanics and control. II. Control. Biol. Cybern. 87:40 –49, 2002. Copyright © 2002 Cambridge University Press. Used with permission.)
References
-
- Arimoto S, Tahara K, Yamaguchi M, Nguyen PTA, Han HY. Principle of superposition for controlling pinch motions by means of robot fingers with soft tips. Robotica. 2001;19:21–28.
-
- Baud-Bovy G, Soechting JF. Two virtual fingers in the control of the tripod grasp. J Neurophysiol. 2001;86:604–615. - PubMed
-
- Bernstein NA. The Co-ordination and Regulation of Movement. Oxford: Pergamon Press; 1967.
-
- Cole KJ, Abbs JH. Coordination of three-joint digit movements for rapid finger-thumb grasp. J Neurophysiol. 1986;55:1407–1423. - PubMed
-
- Danion F, Schoner G, Latash ML, Li S, Scholz JP, Zatsiorsky VM. A mode hypothesis for finger interaction during multi-finger force-production tasks. Biol Cybern. 2003;88:91–98. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
