

Spinal muscle forces, internal loads and stability in standing under various postures and loads--application of kinematics-based algorithm
- PMID: 15452703
- PMCID: PMC3489208
- DOI: 10.1007/s00586-004-0779-0
Spinal muscle forces, internal loads and stability in standing under various postures and loads--application of kinematics-based algorithm
Abstract
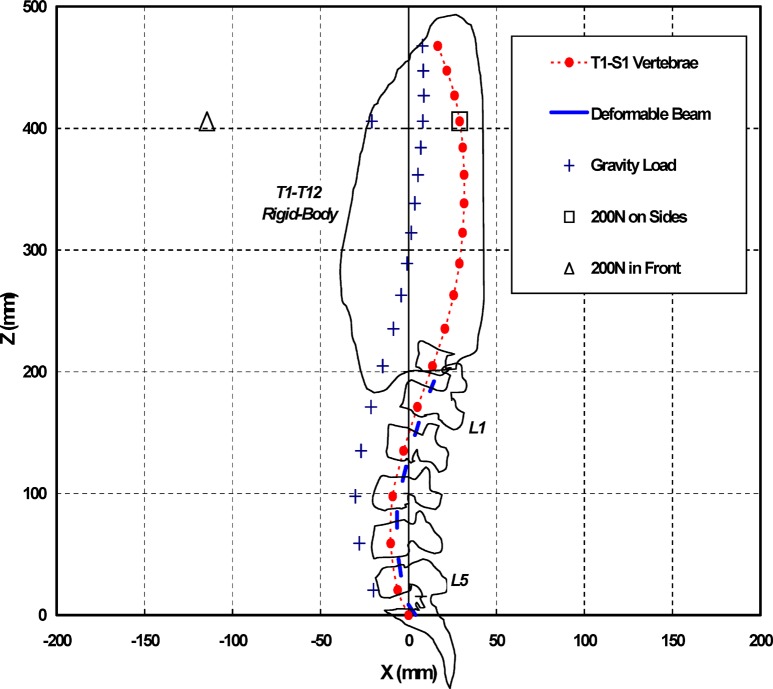
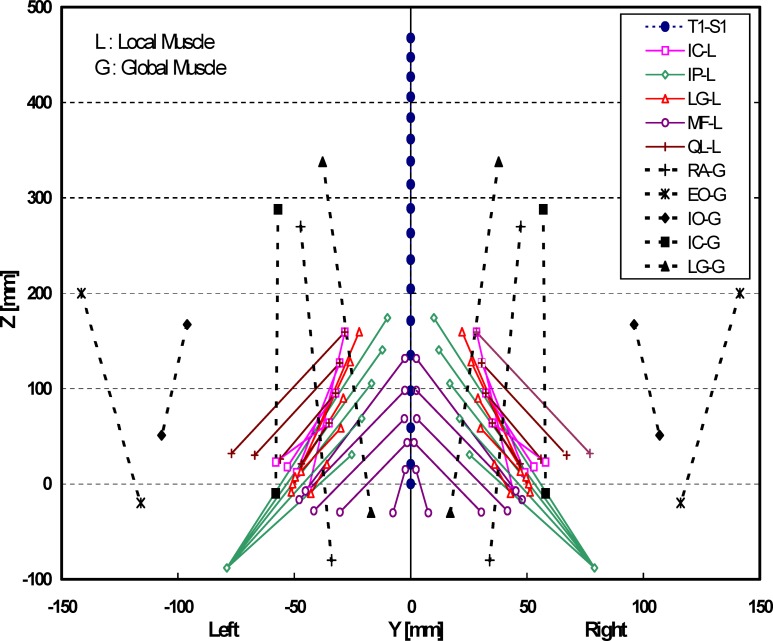
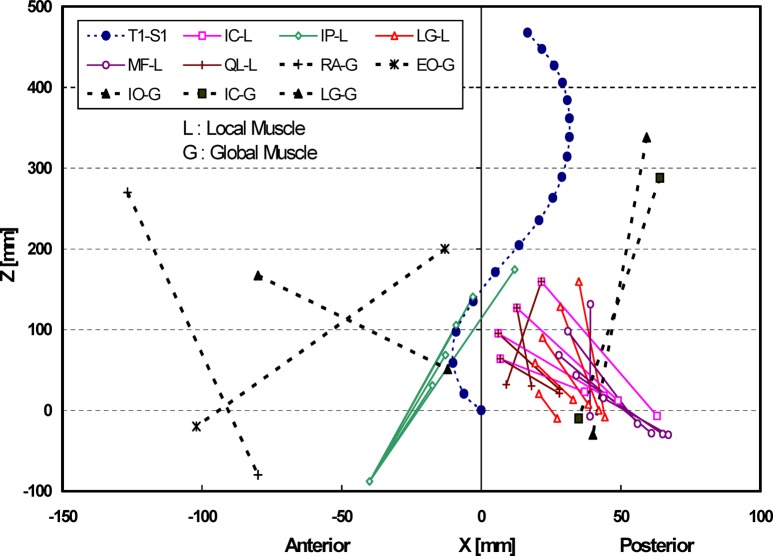
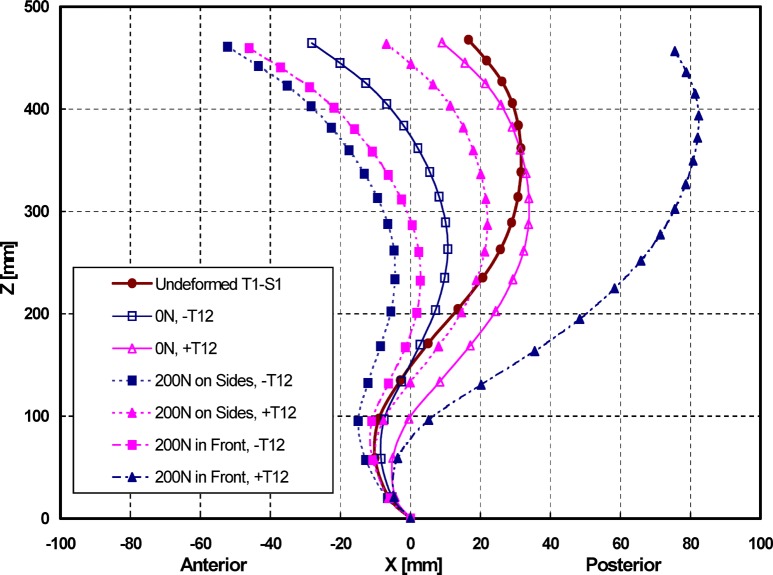
This work aimed to evaluate trunk muscle forces, internal loads and stability margin under some simulated standing postures, with and without external loads, using a nonlinear finite element model of the T1-S1 spine with realistic nonlinear load-displacement properties. A novel kinematics-based algorithm was applied that exploited a set of spinal sagittal rotations, initially calculated to minimize balancing moments, to solve the redundant active-passive system. The loads consisted of upper body gravity distributed along the spine with or without 200 N held in the hands, either in the front of the body or on the sides. Nonlinear and linear stability/perturbation analyses at deformed, stressed configurations with a linear stiffness-force relationship for muscles identified the system stability and critical muscle stiffness coefficient. Predictions were in good agreement with reported measurements of posture, muscle EMG and intradiscal pressure. Minimal changes in posture (posterior pelvic tilt and lumbar flattening) substantially influenced muscle forces, internal loads and stability margin. Addition of 200 N load in front of the body markedly increased the system stability, global muscle forces, and internal loads, which reached anterior shear and compression forces of approximately 500 N and approximately 1,200 N, respectively, at lower lumbar levels. Co-activation in abdominal muscles (up to 3% maximum force) substantially increased extensor muscle forces, internal loads and stability margin, allowing a smaller critical muscle coefficient. A tradeoff existed between lower internal loads in passive tissues and higher stability margins, as both increased with greater muscle activation. The strength of the proposed model is in accounting for the synergy by simultaneous consideration of passive structure and muscle forces under applied postures and loads.
Figures
Similar articles
-
Muscle activity, internal loads, and stability of the human spine in standing postures: combined model and in vivo studies.Spine (Phila Pa 1976). 2004 Dec 1;29(23):2633-42. doi: 10.1097/01.brs.0000146463.05288.0e. Spine (Phila Pa 1976). 2004. PMID: 15564912
-
Biomechanics of changes in lumbar posture in static lifting.Spine (Phila Pa 1976). 2005 Dec 1;30(23):2637-48. doi: 10.1097/01.brs.0000187907.02910.4f. Spine (Phila Pa 1976). 2005. PMID: 16319750
-
Trunk active response and spinal forces in sudden forward loading: analysis of the role of perturbation load and pre-perturbation conditions by a kinematics-driven model.J Biomech. 2015 Jan 2;48(1):44-52. doi: 10.1016/j.jbiomech.2014.11.006. Epub 2014 Nov 20. J Biomech. 2015. PMID: 25476501
-
Muscle force evaluation and the role of posture in human lumbar spine under compression.Eur Spine J. 2002 Dec;11(6):519-26. doi: 10.1007/s00586-002-0397-7. Epub 2002 Apr 3. Eur Spine J. 2002. PMID: 12522708
-
Estimation of loads on human lumbar spine: A review of in vivo and computational model studies.J Biomech. 2016 Apr 11;49(6):833-845. doi: 10.1016/j.jbiomech.2015.12.038. Epub 2015 Dec 31. J Biomech. 2016. PMID: 26873281 Review.
Cited by
-
Can a Novel Light Weight Minimal Support Lifting Exoskeleton Modify Lifting Movement in People without Low Back Pain?Sensors (Basel). 2024 Aug 5;24(15):5067. doi: 10.3390/s24155067. Sensors (Basel). 2024. PMID: 39124113 Free PMC article.
-
Trunk-Pelvis motions and spinal loads during upslope and downslope walking among persons with transfemoral amputation.J Biomech. 2019 Oct 11;95:109316. doi: 10.1016/j.jbiomech.2019.109316. Epub 2019 Aug 19. J Biomech. 2019. PMID: 31471112 Free PMC article.
-
The lumbar spine has an intrinsic shape specific to each individual that remains a characteristic throughout flexion and extension.Eur Spine J. 2014 Apr;23 Suppl 1(Suppl 1):S26-32. doi: 10.1007/s00586-013-3162-1. Epub 2014 Jan 11. Eur Spine J. 2014. PMID: 24413745 Free PMC article.
-
Breast size, thoracic kyphosis, and thoracic spine pain: a correlational survey of Nigerian postpartum mothers.BMC Musculoskelet Disord. 2024 Nov 20;25(1):934. doi: 10.1186/s12891-024-07978-x. BMC Musculoskelet Disord. 2024. PMID: 39563285 Free PMC article.
-
Spinal loads during post-operative physiotherapeutic exercises.PLoS One. 2014 Jul 7;9(7):e102005. doi: 10.1371/journal.pone.0102005. eCollection 2014. PLoS One. 2014. PMID: 24999808 Free PMC article.
References
-
- Aspden Spine. 1989;14:276. - PubMed
-
- Bergmark Acta Orthop Scand Suppl. 1989;230:1. - PubMed
-
- Bogduk Spine. 1992;17:897. - PubMed
-
- Cholewicki J Biomech Eng. 1995;117:339. - PubMed
-
- Cholewicki J, McGill SM (1996) Mechanical stability of the in vivo lumbar spine: Implications for injury and chronic low back pain. Clin Biomech (Bristol, Avon) 11:1–15 - PubMed
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
Medical
