

Force feedback plays a significant role in minimally invasive surgery: results and analysis
- PMID: 15621997
- PMCID: PMC1356852
- DOI: 10.1097/01.sla.0000149301.60553.1e
Force feedback plays a significant role in minimally invasive surgery: results and analysis
Abstract
Objective: To evaluate the role of force feedback with applications to minimally invasive surgery (MIS). Two research hypotheses were tested using our automated laparoscopic grasper.
Summary background data: Conventional laparoscopic tools do not have the ability of providing force feedback to a surgeon when in use with or without robotic surgical systems. Loss of haptic (force and tactile) feedback in MIS procedures is a disadvantage to surgeons since they are conventionally used to palpating tissues to diagnose tissues as normal or abnormal. Therefore, the need exists to incorporate force feedback into laparoscopic tools.
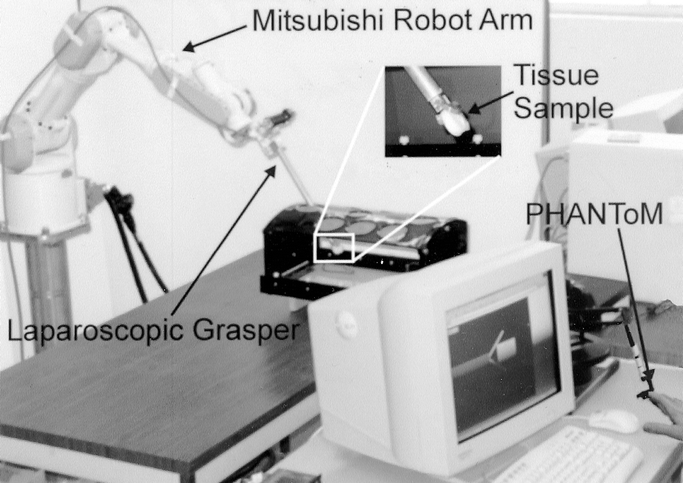
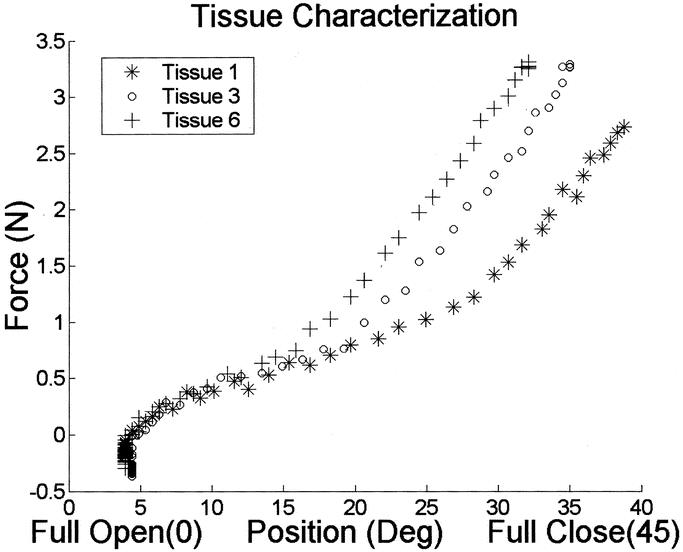
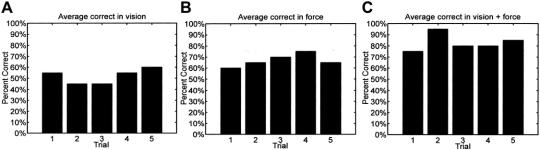
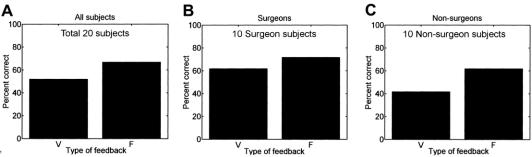
Methods: We have developed an automated laparoscopic grasper with force feedback capability to help surgeons differentiate tissue stiffness through a haptic interface device. We tested our system with 20 human subjects (10 surgeons and 10 nonsurgeons) using our grasper to evaluate the role of force feedback to characterize tissues and answer 2 research hypotheses.
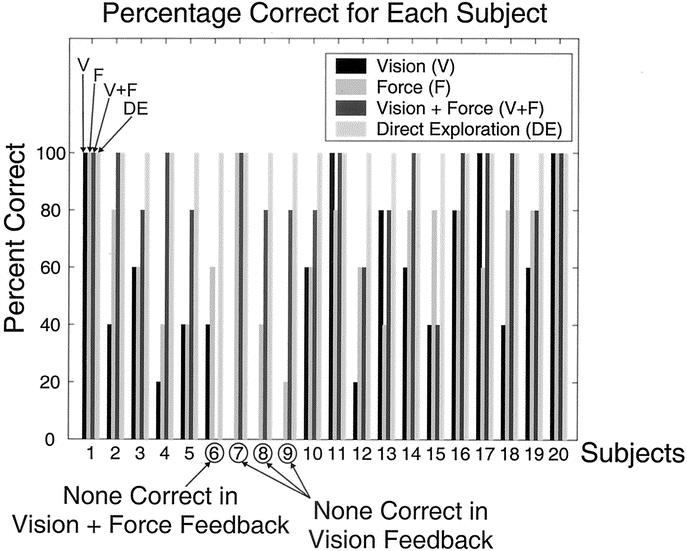
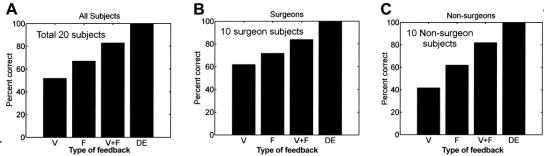
Results: Our experiments confirmed 1 of our 2 research hypotheses, namely, providing both vision and force feedback leads to better tissue characterization than only vision feedback or only force feedback.
Conclusions: We have validated 1 of our 2 research hypotheses regarding incorporating force feedback with vision feedback to characterize tissues of varying stiffness.
Figures
References
-
- Chen HS, Sheen-Chenn SM. Synchronous and early metachronous colorectal adenocarcinoma: analysis of prognosis and current trends. Dis Colon Rectum. 2000;43:1093–1099. - PubMed
-
- Krupa A, Morel G, de Mathelin M. Achieving high precision laparoscopic manipulation through adaptive force control. IEEE International Conference on Robotics and Automation, 2002:1864–1869.
-
- Taylor RH, Funda J, Eldridge B, et al. A telerobotic assistant for laparoscopic surgery. IEEE Eng Med Biol. 1995;14:279–286.
-
- Munoz VF, Vara-Thorbeck C, DeGabriel JG, et al. A medical robotic assistant for minimally invasive surgery. IEEE International Conference on Robotics and Automation, Vol. 3. 2000:2901–2906.
-
- Bicchi A, Canepa G, DeRossi D, et al. A sensor-based minimally invasive surgery tool for detecting tissue elastic properties. IEEE International Conference on Robotics and Automation, Vol. 1. 1996:884–888.
Publication types
MeSH terms
Substances
LinkOut - more resources
Full Text Sources
Other Literature Sources
