

Biomechanical characterization of the three-dimensional kinematic behaviour of the Dynesys dynamic stabilization system: an in vitro study
- PMID: 16217663
- PMCID: PMC3489456
- DOI: 10.1007/s00586-005-0948-9
Biomechanical characterization of the three-dimensional kinematic behaviour of the Dynesys dynamic stabilization system: an in vitro study
Abstract
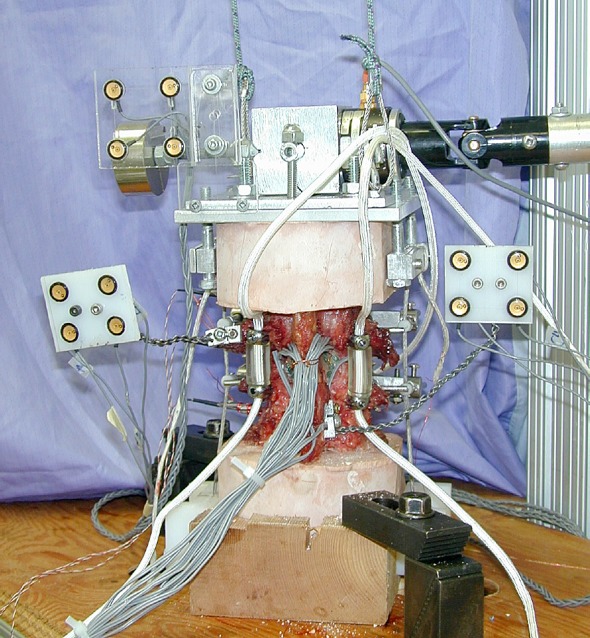
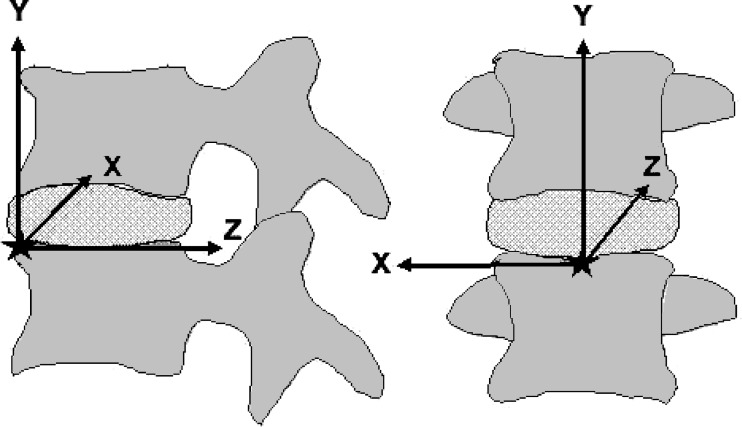
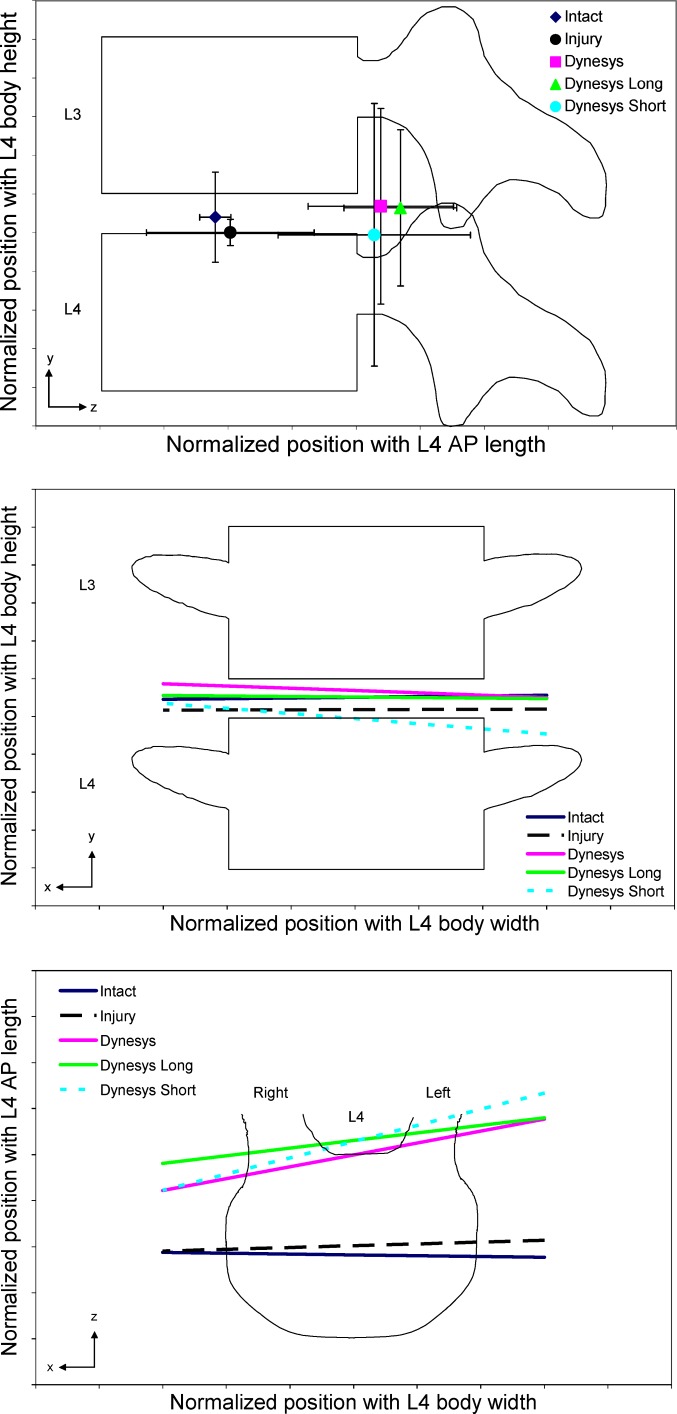
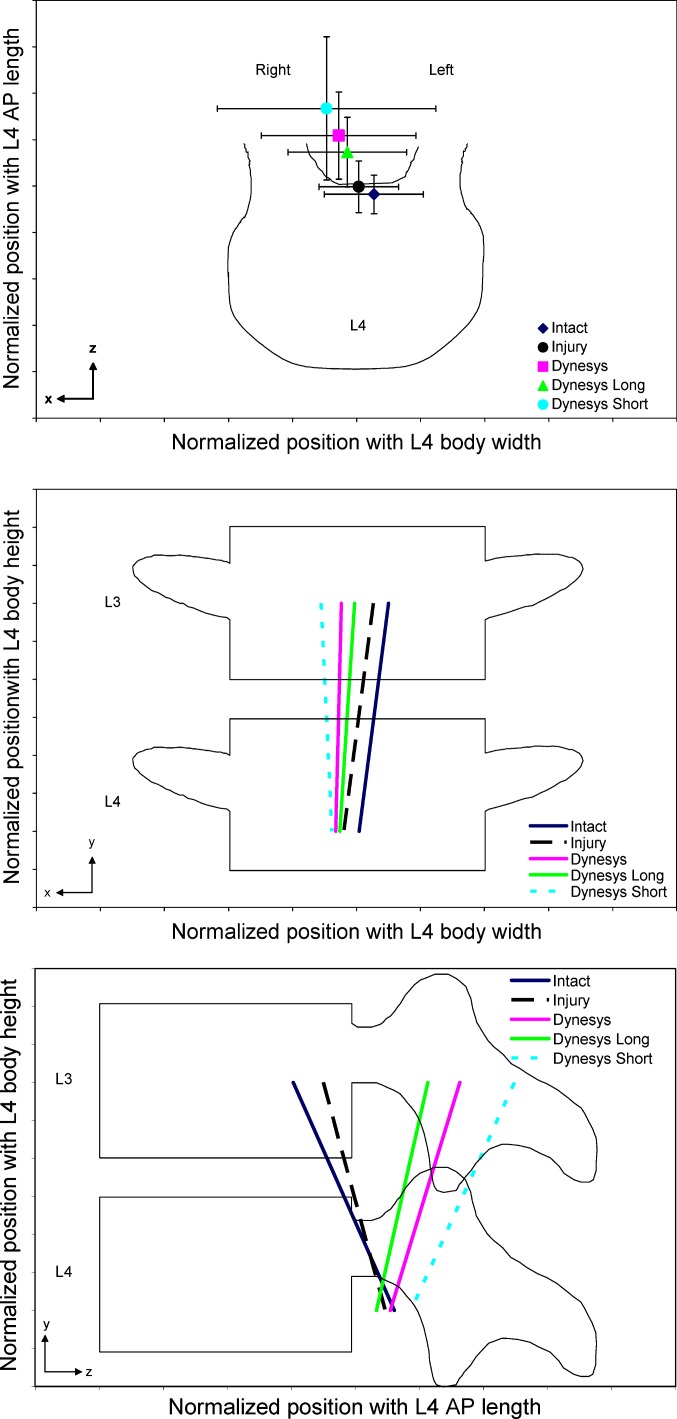
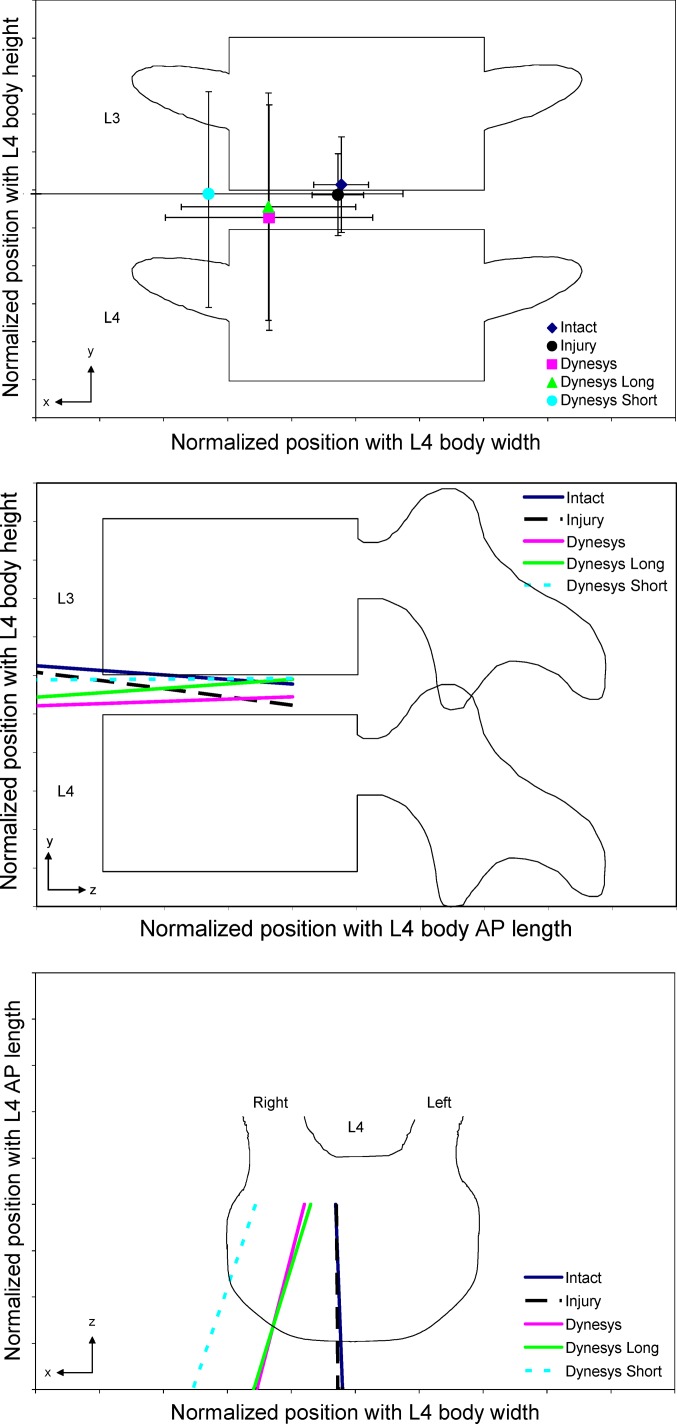
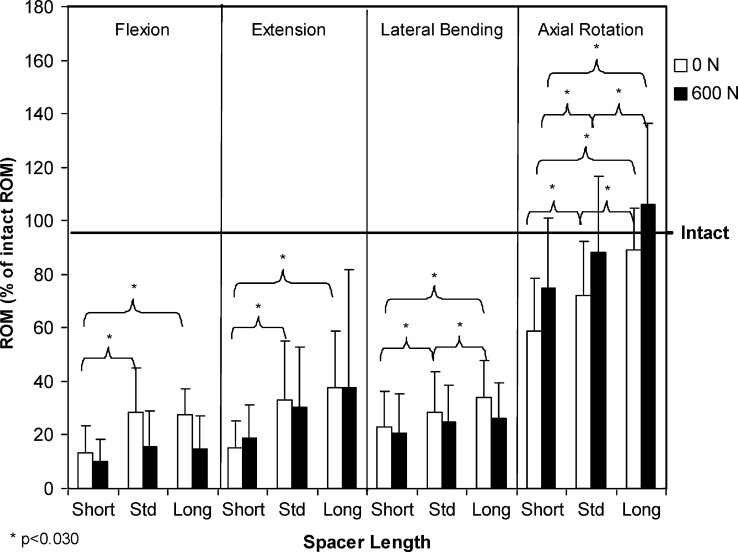
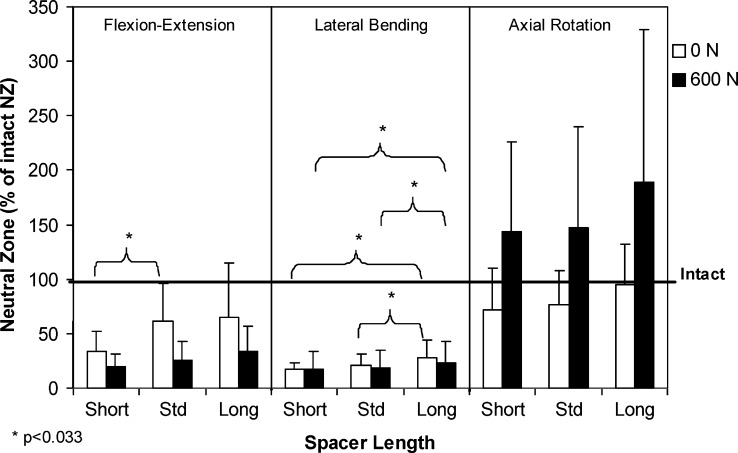
The Dynesys, a flexible posterior stabilization system that provides an alternative to fusion, is designed to preserve intersegmental kinematics and alleviate loading at the facet joints. Recent biomechanical evidence suggests that the overall range of motion (ROM) with the Dynesys is less than the intact spine. The purpose of this investigation was to conduct a comprehensive characterization of the three-dimensional kinematic behaviour of the Dynesys and determine if the length of the Dynesys polymer spacer contributes to differences in the kinematic behaviour at the implanted level. Ten cadaveric lumbar spine segments (L2-L5) were tested by applying a pure moment of +/-7.5 Nm in flexion-extension, lateral bending, and axial rotation, with and without a follower preload of 600 N. Test conditions included: (a) intact; (b) injury; (c) injury stabilized with Dynesys at L3-L4 (standard spacer); (d) long spacer (+2 mm); and (e) short spacer (-2 mm). Intervertebral rotations were measured using an optoelectronic camera system. The intersegmental range of motion (ROM), neutral zone (NZ), and three-dimensional helical axis of motion (HAM) were calculated. Statistical significance of changes in ROM, NZ, and HAM was determined using repeated measures analysis of variance (ANOVA) and Student-Newman-Keuls post-hoc analysis with P<0.05. Implantation of the standard length Dynesys significantly reduced ROM compared to the intact and injured specimens, with the least significant changes seen in axial rotation. Injury typically increased the NZ, but implantation of the Dynesys restored the NZ to a magnitude less that that of the intact spine. The Dynesys produced a significant posterior shift in the HAM in flexion-extension and axial rotation. The spacer length had a significant effect on ROM with the long spacer resulting in the largest ROM in all loading directions without a follower preload. The largest differences were in axial rotation. A 4 mm increase in spacer length led to an average intersegmental motion increase of 30% in axial rotation, 23% in extension, 14% in flexion, and 11% in lateral bending. There were no significant changes in NZ with different spacer lengths. Typically, the short spacer caused a greater shift and a greater change in orientation of the HAM than the long spacer. The long spacer resulted in a ROM and a motion pattern, as represented by the HAM, that was closer to that seen in an intact specimen. The results of this study suggest that the length of the Dynesys spacer altered the segmental position and therefore affected kinematic behaviour.
Figures
Similar articles
-
The effect of dynamic posterior stabilization on facet joint contact forces: an in vitro investigation.Spine (Phila Pa 1976). 2008 Jan 1;33(1):19-26. doi: 10.1097/BRS.0b013e31815e7f76. Spine (Phila Pa 1976). 2008. PMID: 18165744
-
Biomechanical evaluation of the Total Facet Arthroplasty System: 3-dimensional kinematics.Spine (Phila Pa 1976). 2007 Jan 1;32(1):55-62. doi: 10.1097/01.brs.0000250983.91339.9f. Spine (Phila Pa 1976). 2007. PMID: 17202893
-
[Biomechanical stability of unilateral pedicle screw fixation on cadaveric model simulated two-level posterior lumbar interbody fusion].Zhonghua Wai Ke Za Zhi. 2011 May 1;49(5):436-9. Zhonghua Wai Ke Za Zhi. 2011. PMID: 21733402 Chinese.
-
Posterior Dynamic Stabilization of the Lumbar Spine Review of Biomechanical and Clinical Studies.Bull Hosp Jt Dis (2013). 2018 Jun;76(2):100-104. Bull Hosp Jt Dis (2013). 2018. PMID: 29799368 Review.
-
Moment-rotation behavior of intervertebral joints in flexion-extension, lateral bending, and axial rotation at all levels of the human spine: A structured review and meta-regression analysis.J Biomech. 2020 Feb 13;100:109579. doi: 10.1016/j.jbiomech.2019.109579. Epub 2019 Dec 16. J Biomech. 2020. PMID: 31911050 Free PMC article. Review.
Cited by
-
Kinematic evaluation of one- and two-level Maverick lumbar total disc replacement caudal to a long thoracolumbar spinal fusion.Eur Spine J. 2012 Jun;21 Suppl 5(Suppl 5):S599-611. doi: 10.1007/s00586-012-2301-4. Epub 2012 Apr 25. Eur Spine J. 2012. PMID: 22531900 Free PMC article.
-
Role of biomechanics in intervertebral disc degeneration and regenerative therapies: what needs repairing in the disc and what are promising biomaterials for its repair?Spine J. 2013 Mar;13(3):243-62. doi: 10.1016/j.spinee.2012.12.002. Epub 2013 Jan 29. Spine J. 2013. PMID: 23369494 Free PMC article. Review.
-
Non-fusion instrumentation of the lumbar spine with a hinged pedicle screw rod system: an in vitro experiment.Eur Spine J. 2009 Oct;18(10):1478-85. doi: 10.1007/s00586-009-1052-3. Epub 2009 Jun 6. Eur Spine J. 2009. PMID: 19504129 Free PMC article.
-
Biomechanical analysis and design of a dynamic spinal fixator using topology optimization: a finite element analysis.Med Biol Eng Comput. 2014 May;52(5):499-508. doi: 10.1007/s11517-014-1154-x. Epub 2014 Apr 16. Med Biol Eng Comput. 2014. PMID: 24737048
-
Biomechanical finite element analysis of vertebral column resection and posterior unilateral vertebral resection and reconstruction osteotomy.J Orthop Surg Res. 2021 Jan 28;16(1):88. doi: 10.1186/s13018-021-02237-4. J Orthop Surg Res. 2021. PMID: 33509235 Free PMC article.
References
-
- Eck JC, Humphreys SC, Hodges SD. Adjacent-segment degeneration after lumbar fusion: a review of clinical, biomechanical, and radiologic studies. Am J Orthop. 1999;28:336–340. - PubMed
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
Medical
