

Modeling sensorimotor learning with linear dynamical systems
- PMID: 16494690
- PMCID: PMC2536592
- DOI: 10.1162/089976606775774651
Modeling sensorimotor learning with linear dynamical systems
Abstract
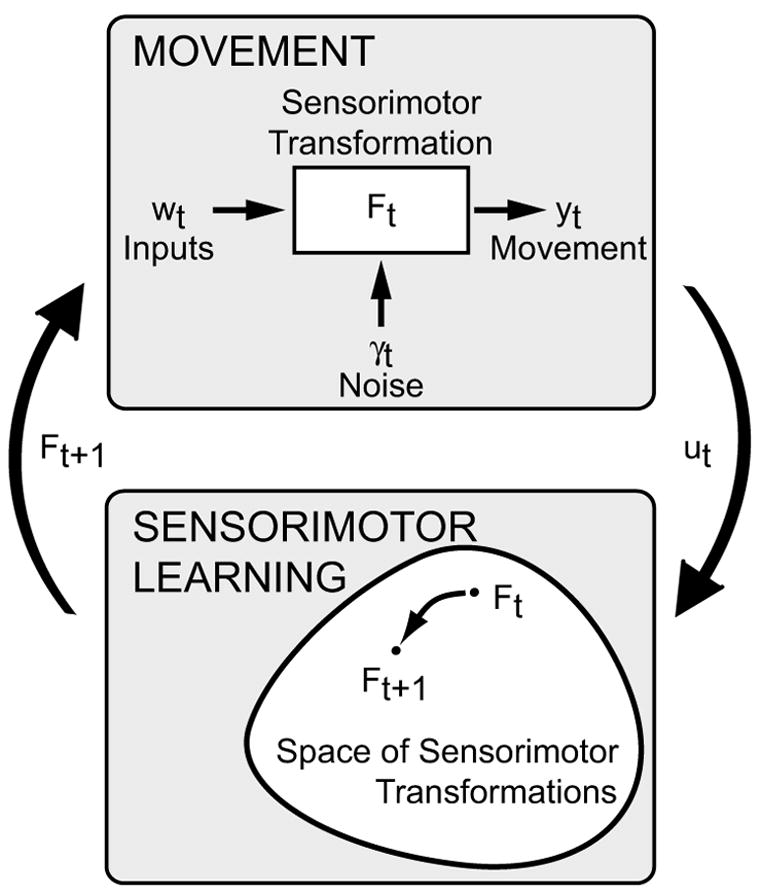
Recent studies have employed simple linear dynamical systems to model trial-by-trial dynamics in various sensorimotor learning tasks. Here we explore the theoretical and practical considerations that arise when employing the general class of linear dynamical systems (LDS) as a model for sensorimotor learning. In this framework, the state of the system is a set of parameters that define the current sensorimotor transformation-the function that maps sensory inputs to motor outputs. The class of LDS models provides a first-order approximation for any Markovian (state-dependent) learning rule that specifies the changes in the sensorimotor transformation that result from sensory feedback on each movement. We show that modeling the trial-by-trial dynamics of learning provides a substantially enhanced picture of the process of adaptation compared to measurements of the steady state of adaptation derived from more traditional blocked-exposure experiments. Specifically, these models can be used to quantify sensory and performance biases, the extent to which learned changes in the sensorimotor transformation decay over time, and the portion of motor variability due to either learning or performance variability. We show that previous attempts to fit such models with linear regression have not generally yielded consistent parameter estimates. Instead, we present an expectation-maximization algorithm for fitting LDS models to experimental data and describe the difficulties inherent in estimating the parameters associated with feedback-driven learning. Finally, we demonstrate the application of these methods in a simple sensorimotor learning experiment: adaptation to shifted visual feedback during reaching.
Figures

References
-
- Anderson BDO, Moore JB. Optimal Filtering. Prentice-Hall; Englewood Cliffs, N.J: 1979.
-
- Baraduc P, Wolpert DM. Adaptation to a visuomotor shift depends on the starting posture. J Neurophysiol. 2002;88(2):973–981. - PubMed
-
- Dempster AP, Laird NM, Rubin DB. Maximum likelihood from incomplete data via the EM algorithm. J Royal Statistical Society, Series B. 1977;39:1–38.
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources