

Collegial decision making based on social amplification leads to optimal group formation
- PMID: 16581903
- PMCID: PMC1458659
- DOI: 10.1073/pnas.0507877103
Collegial decision making based on social amplification leads to optimal group formation
Abstract
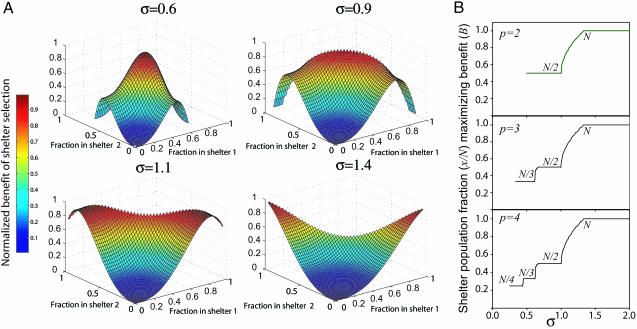
Group-living animals are often faced with choosing between one or more alternative resource sites. A central question in such collective decision making includes determining which individuals induce the decision and when. This experimental and theoretical study of shelter selection by cockroach groups demonstrates that choices can emerge through nonlinear interaction dynamics between equal individuals without perfect knowledge or leadership. We identify a simple mechanism whereby a decision is taken on the move with limited information and signaling and without comparison of available opportunities. This mechanism leads to optimal mean benefit for group individuals. Our model points to a generic self-organized collective decision-making process independent of animal species.
Conflict of interest statement
Conflict of interest statement: No conflicts declared.
Figures



References
-
- Giraldeau L. A., Caraco T. Social Foraging Theory. Princeton: Princeton Univ. Press; 2000.
-
- Parrish J. K., Hamner W. M., editors. Animal Groups in Three Dimensions. Cambridge, U.K.: Cambridge Univ. Press; 1997.
-
- Krause J., Ruxton G. D. Living in Groups. Oxford: Oxford Univ. Press; 2002.
-
- Parrish J. K., Edelstein-Keshet L. Science. 1999;284:99–101. - PubMed
-
- Couzin I. D., Krause J., Franks N. R., Levin S. Nature. 2004;443:513–516. - PubMed
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
