

Adjustments of prehension synergies in response to self-triggered and experimenter-triggered load and torque perturbations
- PMID: 16804720
- PMCID: PMC2821078
- DOI: 10.1007/s00221-006-0583-7
Adjustments of prehension synergies in response to self-triggered and experimenter-triggered load and torque perturbations
Abstract
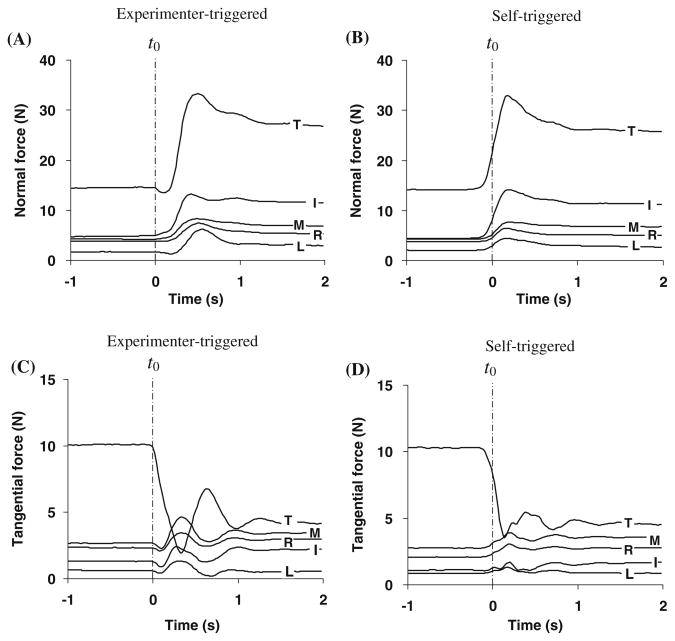
Humans are known to show anticipatory adjustments in the grip force prior to a self-generated or predictable action or perturbation applied to a hand-held object. We investigated whether humans can also adjust covariation of individual finger forces (multi-finger synergies) prior to self-triggered perturbations. To address this issue, we studied adjustments in multi-digit synergies associated with applied load/torque perturbations while the subjects held a customized handle steadily. The main hypothesis was that the subjects would be able to demonstrate the phenomenon of anticipatory covariation, that is changes in covariation patterns among digit forces and moments of force in anticipation of a perturbation, but only when the perturbation was triggered by the subjects themselves. Based on the principle of superposition (decoupled grasping force and resultant torque control), we also expected to see different adjustments in indices of multi-digit synergies stabilizing the total gripping force and the total moment of force. The task for the subjects (n = 8) was to return the initial handle position as quickly as possible after a perturbation, which consisted of removing one of three loads hanging from the handle. There were six experimental conditions: two types of perturbations (self-triggered and experimenter-triggered) by three positions of the load (left, center, and right). Three-dimensional forces and moments of force recorded from each digit contact were used for the analysis. Indices of covariation among digit forces and among moments of force, previously employed for studying motor synergies, were computed across trials. Positive values of the indices reflected negative covariations of individual digit forces and moments of force (their inter-compensatory changes) to stabilize the total force and moment acting on the handle. In steady-state conditions, subjects showed strong positive indices for both digit forces and digit moments. Under the self-triggered conditions, changes in the indices of digit force and moment covariation were seen about 150 ms prior to the perturbation, while such changes were observed only after the perturbation under the experimenter-triggered conditions. Immediately following a perturbation, the indices of force and moment covariation rapidly changed to negative revealing the lack of inter-compensation among the individual digit forces and moments. Later, both indices showed a recovery to positive values; the recovery was faster in the self-triggered conditions than in the experimenter-triggered ones. During the steady-state phase after the perturbation, the indices of force and moment covariation decreased and increased, respectively, as compared to their values during the steady-state phase prior to the perturbation. We conclude that humans are able to adjust multi-digit synergies involved in prehensile tasks in anticipation of a self-triggered perturbation. These conclusions speak against hypotheses on the organization of multi-element actions based on optimal control principles. Different changes in the indices of force and moment covariation after a perturbation corroborate the principle of superposition. We discuss relations of anticipatory covariation to anticipatory postural adjustments.
Figures








Similar articles
-
Anticipatory adjustments of multi-finger synergies in preparation for self-triggered perturbations.Exp Brain Res. 2006 Oct;174(4):604-12. doi: 10.1007/s00221-006-0505-8. Epub 2006 May 25. Exp Brain Res. 2006. PMID: 16724179
-
Digit force adjustments during finger addition/removal in multi-digit prehension.Exp Brain Res. 2008 Aug;189(3):345-59. doi: 10.1007/s00221-008-1430-9. Epub 2008 Jun 14. Exp Brain Res. 2008. PMID: 18553076 Free PMC article.
-
Prehension synergies during smooth changes of the external torque.Exp Brain Res. 2011 Sep;213(4):493-506. doi: 10.1007/s00221-011-2799-4. Epub 2011 Jul 28. Exp Brain Res. 2011. PMID: 21796540 Free PMC article.
-
Multi-finger prehension: control of a redundant mechanical system.Adv Exp Med Biol. 2009;629:597-618. doi: 10.1007/978-0-387-77064-2_32. Adv Exp Med Biol. 2009. PMID: 19227523 Review.
-
Prehension synergies.Exerc Sport Sci Rev. 2004 Apr;32(2):75-80. doi: 10.1097/00003677-200404000-00007. Exerc Sport Sci Rev. 2004. PMID: 15064652 Free PMC article. Review.
Cited by
-
Multi-finger pressing synergies change with the level of extra degrees of freedom.Exp Brain Res. 2011 Feb;208(3):359-67. doi: 10.1007/s00221-010-2486-x. Epub 2010 Dec 1. Exp Brain Res. 2011. PMID: 21120460
-
Two stages and three components of the postural preparation to action.Exp Brain Res. 2011 Jul;212(1):47-63. doi: 10.1007/s00221-011-2694-z. Epub 2011 May 3. Exp Brain Res. 2011. PMID: 21537967 Free PMC article.
-
Multi-Finger Interaction and Synergies in Finger Flexion and Extension Force Production.Front Hum Neurosci. 2017 Jun 19;11:318. doi: 10.3389/fnhum.2017.00318. eCollection 2017. Front Hum Neurosci. 2017. PMID: 28674489 Free PMC article.
-
Finger inter-dependence: linking the kinetic and kinematic variables.Hum Mov Sci. 2008 Jun;27(3):408-22. doi: 10.1016/j.humov.2007.08.005. Epub 2008 Feb 5. Hum Mov Sci. 2008. PMID: 18255182 Free PMC article.
-
Kinematic synergies during saccades involving whole-body rotation: a study based on the uncontrolled manifold hypothesis.Hum Mov Sci. 2010 Apr;29(2):243-58. doi: 10.1016/j.humov.2010.02.003. Epub 2010 Mar 25. Hum Mov Sci. 2010. PMID: 20346529 Free PMC article.
References
-
- Adkin AL, Frank JS, Carpenter MG, Peysar GW. Fear of falling modifies anticipatory postural control. Exp Brain Res. 2002;143:160–170. - PubMed
-
- Arimoto S, Nguyen PTA. Principle of superposition for realising dexterous pinching motions of a pair of robot fingers with soft-tips. IEICE Trans Fundam Electron Commun Comput Sci. 2001;E84A:39–47.
-
- Arimoto S, Nguyen PTA, Han HY, Doulgeri Z. Dynamics and control of a set of dual fingers with soft tips. Robotica. 2000;18:71–80.
-
- Arimoto S, Tahara K, Yamaguchi M, Nguyen PTA, Han HY. Principles of superposition for controlling pinch motions by means of robot fingers with soft tips. Robotica. 2001;19:21–28.
-
- Aruin AS, Latash ML. Anticipatory postural adjustments during self-initiated perturbations of different magnitude triggered by a standard motor action. Electroencephalogr Clin Neurophysiol. 1996;101:497–503. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
