

Actions and consequences in bimanual interaction are represented in different coordinate systems
- PMID: 16807341
- PMCID: PMC2626370
- DOI: 10.1523/JNEUROSCI.0943-06.2006
Actions and consequences in bimanual interaction are represented in different coordinate systems
Abstract
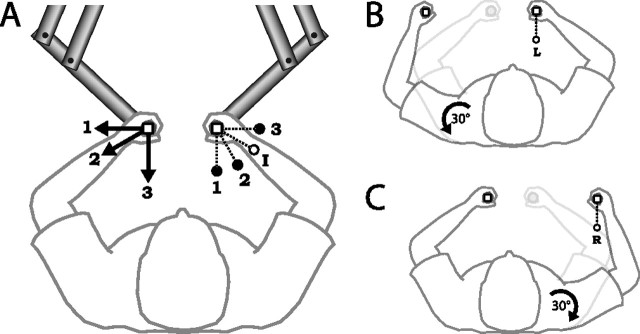
Moving one part of the body can generate interaction forces that tend to destabilize other parts of the body. However, stability is maintained by mechanisms that predict and actively oppose these interaction forces. When our body or environment changes, these anticipatory mechanisms adapt so as to continue to produce accurate predictions. In this study, we examine the acquisition of a novel predictive coordination between the arms, in a situation in which a force is produced on one hand as a consequence of the action of the other hand. Specifically, a force was applied to the left hand that depended on the velocity of the right hand. With practice, subjects learned to stabilize the perturbed left arm during right-arm movements by predicting and actively opposing the externally applied forces. After adaptation, we examined how learning generalized to a new joint configuration of the right or left arm to investigate the coordinate systems in which the internal transformation from movement to force is represented. This revealed a dissociation between the representation of the action of the right arm and the representation of its consequence, that is the force on the left arm. The movement is represented in extrinsic coordinates related to the velocity of the hand, whereas the force resulting from the movement is represented in a joint-based intrinsic coordinate system.
Figures
References
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources