

Compliant leg behaviour explains basic dynamics of walking and running
- PMID: 17015312
- PMCID: PMC1664632
- DOI: 10.1098/rspb.2006.3637
Compliant leg behaviour explains basic dynamics of walking and running
Abstract
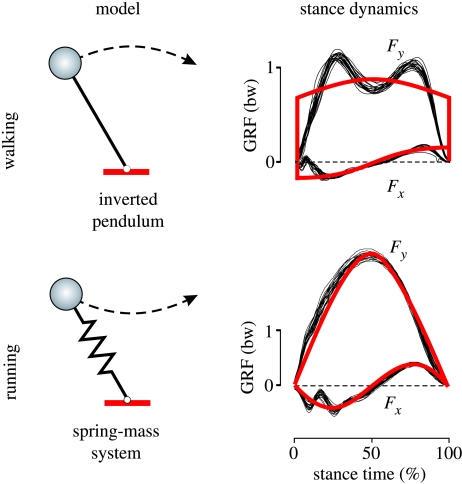
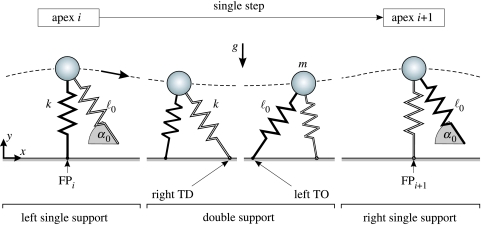
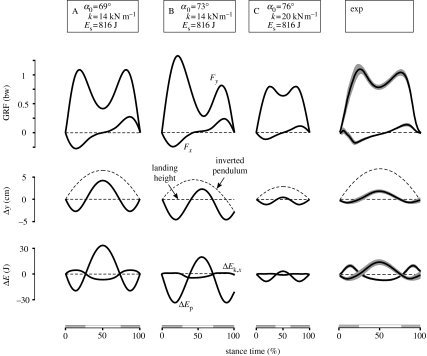
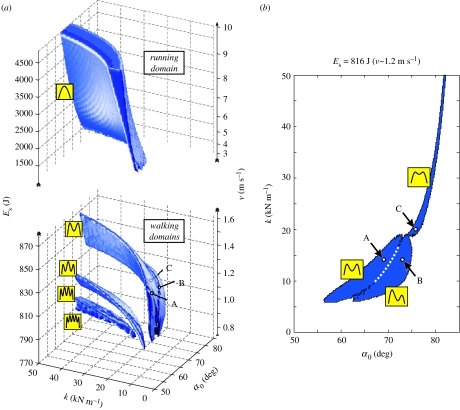
The basic mechanics of human locomotion are associated with vaulting over stiff legs in walking and rebounding on compliant legs in running. However, while rebounding legs well explain the stance dynamics of running, stiff legs cannot reproduce that of walking. With a simple bipedal spring-mass model, we show that not stiff but compliant legs are essential to obtain the basic walking mechanics; incorporating the double support as an essential part of the walking motion, the model reproduces the characteristic stance dynamics that result in the observed small vertical oscillation of the body and the observed out-of-phase changes in forward kinetic and gravitational potential energies. Exploring the parameter space of this model, we further show that it not only combines the basic dynamics of walking and running in one mechanical system, but also reveals these gaits to be just two out of the many solutions to legged locomotion offered by compliant leg behaviour and accessed by energy or speed.
Figures
References
-
- Alexander R. Mechanics of bipedal locomotion. In: Davies P.S, editor. Perspectives in experimental biology. Pergamon Press; Oxford, UK: 1976. pp. 493–504.
-
- Alexander R. Optimization and gaits in the locomotion of vertebrates. Physiol. Rev. 1989;69:1199–1227. - PubMed
-
- Alexander R. Energy-saving mechanisms in walking and running. J. Exp. Biol. 1991;160:55–69. - PubMed
-
- Blickhan R. The spring–mass model for running and hopping. J. Biomech. 1989;22:1217–1227. doi:10.1016/0021-9290(89)90224-8 - DOI - PubMed
-
- Borelli G. De motu animalium. vol. 1. Lugduni; Leiden, The Netherlands: 1685.
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources