

Why not walk faster?
- PMID: 17148201
- PMCID: PMC1617162
- DOI: 10.1098/rsbl.2005.0312
Why not walk faster?
Abstract
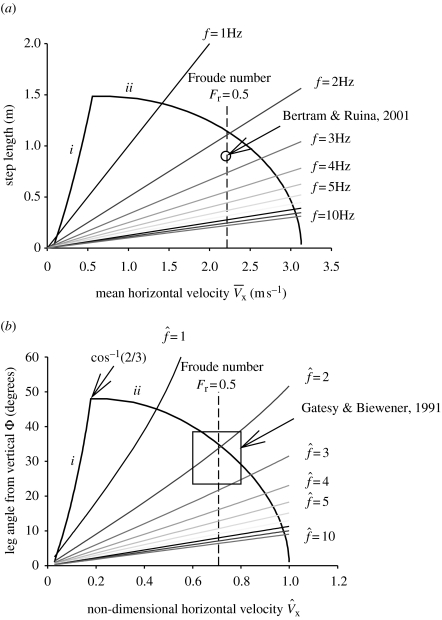
Bipedal walking following inverted pendulum mechanics is constrained by two requirements: sufficient kinetic energy for the vault over midstance and sufficient gravity to provide the centripetal acceleration required for the arc of the body about the stance foot. While the acceleration condition identifies a maximum walking speed at a Froude number of 1, empirical observation indicates favoured walk-run transition speeds at a Froude number around 0.5 for birds, humans and humans under manipulated gravity conditions. In this study, I demonstrate that the risk of 'take-off' is greatest at the extremes of stance. This is because before and after kinetic energy is converted to potential, velocities (and so required centripetal accelerations) are highest, while concurrently the component of gravity acting in line with the leg is least. Limitations to the range of walking velocity and stride angle are explored. At walking speeds approaching a Froude number of 1, take-off is only avoidable with very small steps. With realistic limitations on swing-leg frequency, a novel explanation for the walk-run transition at a Froude number of 0.5 is shown.
Figures

References
-
- Alexander R.M. Mechanics and scaling of terrestrial locomotion. In: Pedley T.J, editor. Scale effects in animal locomotion. Academic Press; New York: 1977. pp. 93–110.
-
- Alexander R.M. Optimization and gaits in the locomotion of vertebrates. Physiol. Rev. 1989;69:1199–1227. - PubMed
-
- Alexander R.M. A model of bipedal locomotion on compliant legs. Phil. Trans. R. Soc. B. 1992;338:189–198. - PubMed
-
- Bertram J.E.A, Ruina A. Multiple walking speed and frequency relations are predicted by constrained optimization. J. Theor. Biol. 2001;209:445–453. - PubMed
-
- Cavagna G.A, Heglund N.C, Taylor C.R. Mechanical work in terrestrial locomotion; two basic mechanisms for minimizing energy expenditure. Am. J. Physiol. 1977;233:R243–R261. - PubMed
MeSH terms
LinkOut - more resources
Full Text Sources