

Calibration of visually guided reaching is driven by error-corrective learning and internal dynamics
- PMID: 17202230
- PMCID: PMC2536620
- DOI: 10.1152/jn.00897.2006
Calibration of visually guided reaching is driven by error-corrective learning and internal dynamics
Abstract
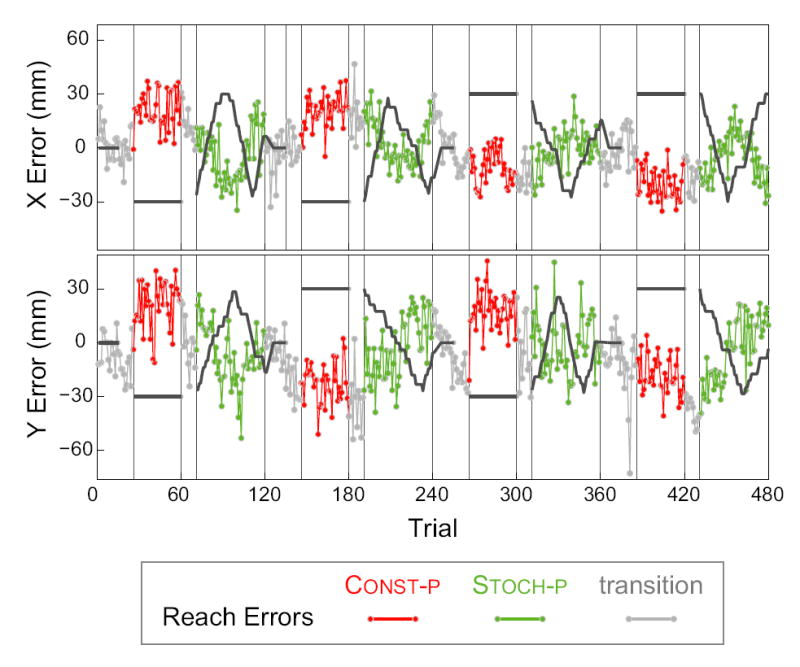
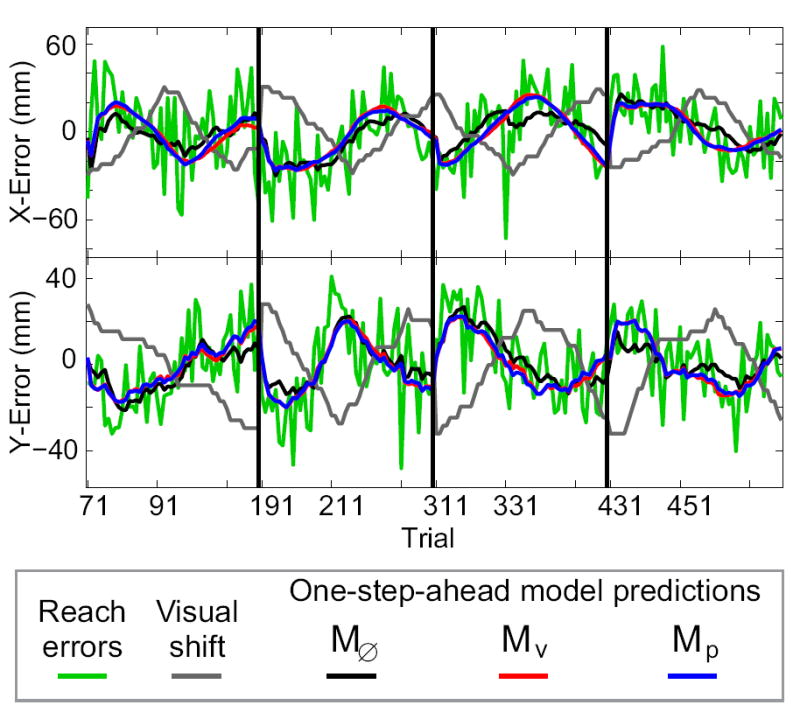
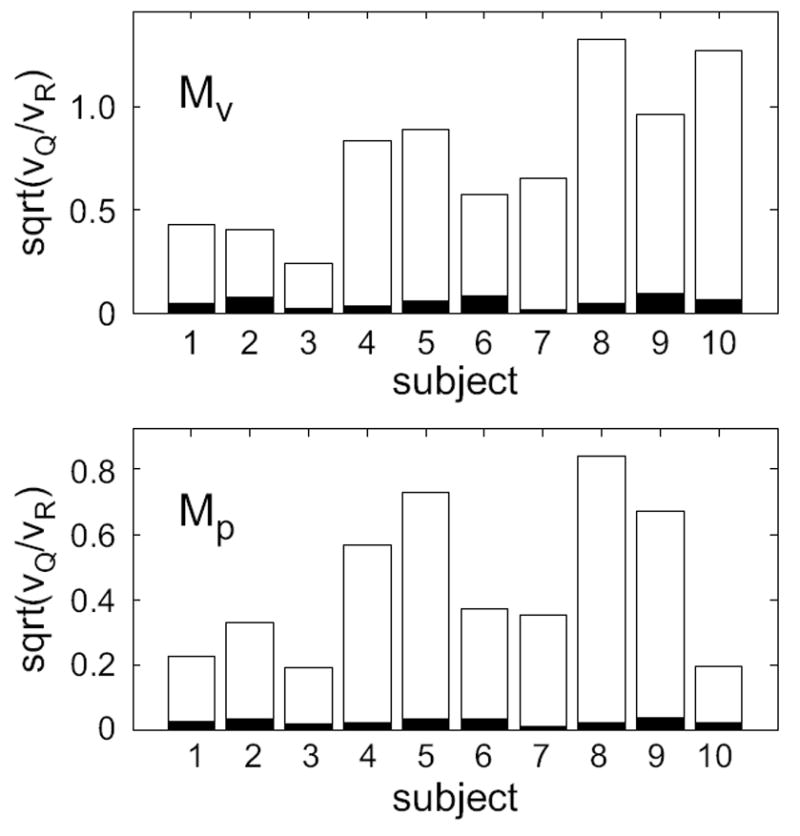
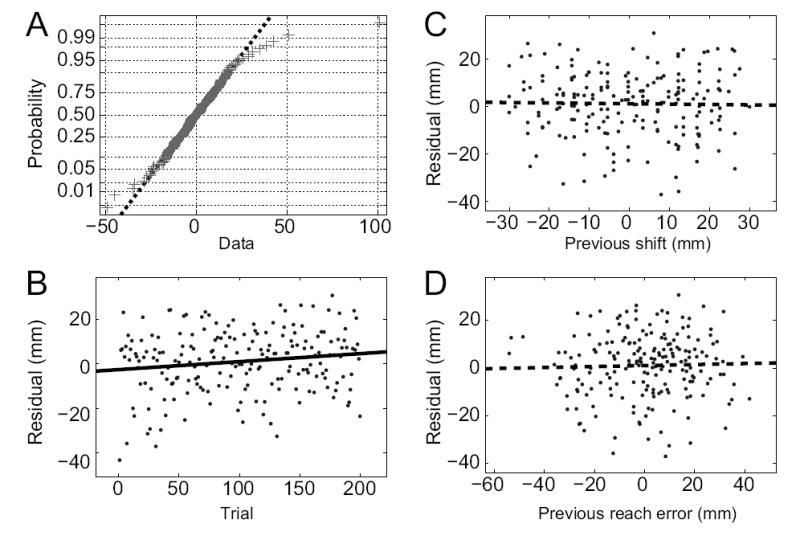
The sensorimotor calibration of visually guided reaching changes on a trial-to-trial basis in response to random shifts in the visual feedback of the hand. We show that a simple linear dynamical system is sufficient to model the dynamics of this adaptive process. In this model, an internal variable represents the current state of sensorimotor calibration. Changes in this state are driven by error feedback signals, which consist of the visually perceived reach error, the artificial shift in visual feedback, or both. Subjects correct for > or =20% of the error observed on each movement, despite being unaware of the visual shift. The state of adaptation is also driven by internal dynamics, consisting of a decay back to a baseline state and a "state noise" process. State noise includes any source of variability that directly affects the state of adaptation, such as variability in sensory feedback processing, the computations that drive learning, or the maintenance of the state. This noise is accumulated in the state across trials, creating temporal correlations in the sequence of reach errors. These correlations allow us to distinguish state noise from sensorimotor performance noise, which arises independently on each trial from random fluctuations in the sensorimotor pathway. We show that these two noise sources contribute comparably to the overall magnitude of movement variability. Finally, the dynamics of adaptation measured with random feedback shifts generalizes to the case of constant feedback shifts, allowing for a direct comparison of our results with more traditional blocked-exposure experiments.
Figures






References
-
- Anderson BDO, Moore JB. Optimal Filtering. Prentice-Hall; Englewood Cliffs, N.J: 1979.
-
- Baizer JS, Glickstein M. Proceedings: Role of cerebellum in prism adaptation. J Physiol. 1974;236(1):34P–35P. - PubMed
-
- Baizer JS, Kralj-Hans I, Glickstein M. Cerebellar lesions and prism adaptation in macaque monkeys. J Neurophysiol. 1999;81(4):1960–1965. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources