

LoCoH: nonparameteric kernel methods for constructing home ranges and utilization distributions
- PMID: 17299587
- PMCID: PMC1797616
- DOI: 10.1371/journal.pone.0000207
LoCoH: nonparameteric kernel methods for constructing home ranges and utilization distributions
Abstract
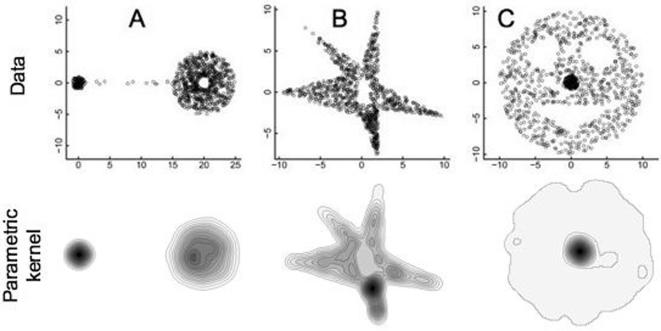
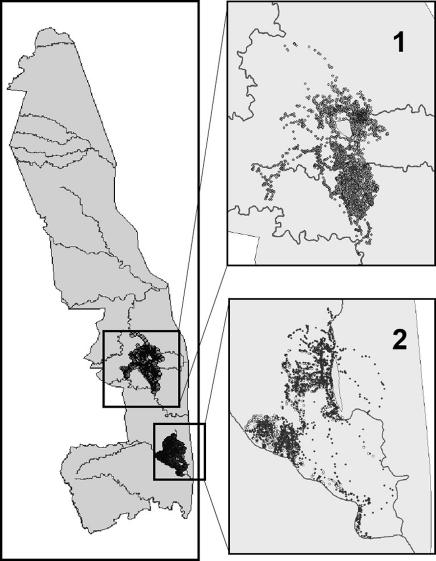
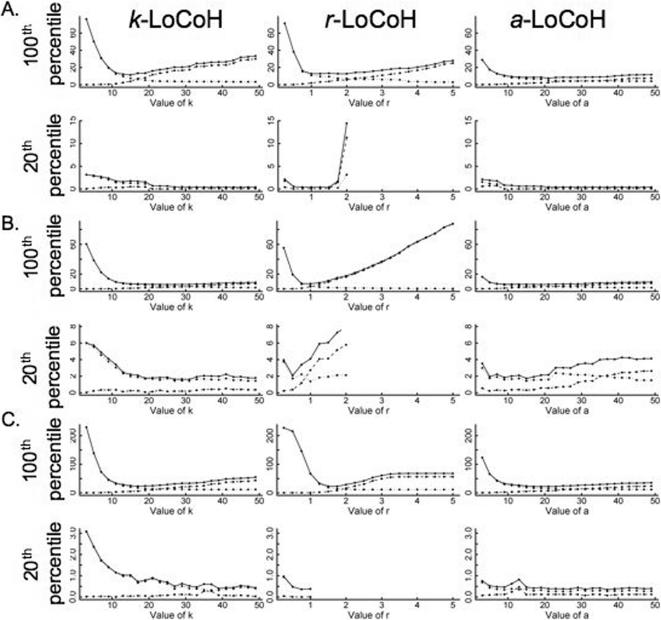
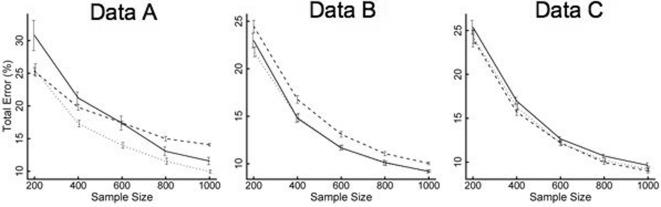
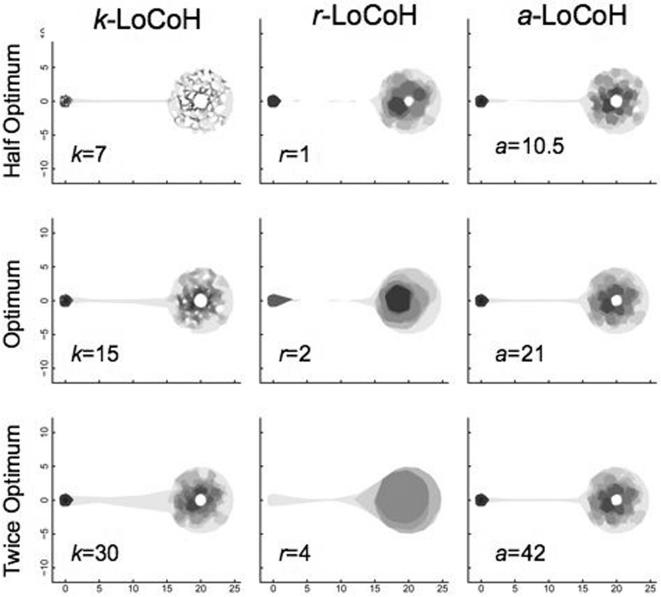
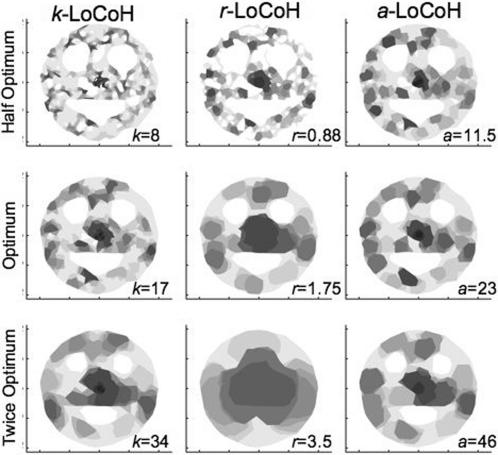
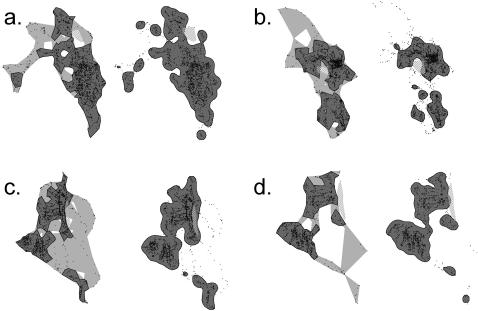
Parametric kernel methods currently dominate the literature regarding the construction of animal home ranges (HRs) and utilization distributions (UDs). These methods frequently fail to capture the kinds of hard boundaries common to many natural systems. Recently a local convex hull (LoCoH) nonparametric kernel method, which generalizes the minimum convex polygon (MCP) method, was shown to be more appropriate than parametric kernel methods for constructing HRs and UDs, because of its ability to identify hard boundaries (e.g., rivers, cliff edges) and convergence to the true distribution as sample size increases. Here we extend the LoCoH in two ways: "fixed sphere-of-influence," or r-LoCoH (kernels constructed from all points within a fixed radius r of each reference point), and an "adaptive sphere-of-influence," or a-LoCoH (kernels constructed from all points within a radius a such that the distances of all points within the radius to the reference point sum to a value less than or equal to a), and compare them to the original "fixed-number-of-points," or k-LoCoH (all kernels constructed from k-1 nearest neighbors of root points). We also compare these nonparametric LoCoH to parametric kernel methods using manufactured data and data collected from GPS collars on African buffalo in the Kruger National Park, South Africa. Our results demonstrate that LoCoH methods are superior to parametric kernel methods in estimating areas used by animals, excluding unused areas (holes) and, generally, in constructing UDs and HRs arising from the movement of animals influenced by hard boundaries and irregular structures (e.g., rocky outcrops). We also demonstrate that a-LoCoH is generally superior to k- and r-LoCoH (with software for all three methods available at http://locoh.cnr.berkeley.edu).
Conflict of interest statement
Figures

References
-
- Matosevic M, Salcic Z, Berber SA. Comparison of Accuracy Using a GPS and a Low-Cost DGPS. IEEE Transactions on Instrumentation and Measurement. 2006;55:1677–1683.
-
- Holden C. Inching toward movement ecology. Science. 2006;313:779–782. - PubMed
-
- Burt WH. Territoriality and home range concepts as applied to mammals. J Mammalogy. 1943;24:346–352.
-
- Kie JG, Baldwin JA, Evans CJ. CALHOME Home Range Analysis Program User's Manual. Fresno, California: United States Forest Service Pacific Southwest Research Station; 1994.
-
- Lawson EJG, Rodgers AR. Differences in home-range size computed in commonly used software programs. Wildlife Society Bulletin. 1997;25:721–729.
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Miscellaneous
