

Potential of a suite of robot/computer-assisted motivating systems for personalized, home-based, stroke rehabilitation
- PMID: 17331243
- PMCID: PMC1821335
- DOI: 10.1186/1743-0003-4-6
Potential of a suite of robot/computer-assisted motivating systems for personalized, home-based, stroke rehabilitation
Abstract
Background: There is a need to improve semi-autonomous stroke therapy in home environments often characterized by low supervision of clinical experts and low extrinsic motivation. Our distributed device approach to this problem consists of an integrated suite of low-cost robotic/computer-assistive technologies driven by a novel universal access software framework called UniTherapy. Our design strategy for personalizing the therapy, providing extrinsic motivation and outcome assessment is presented and evaluated.
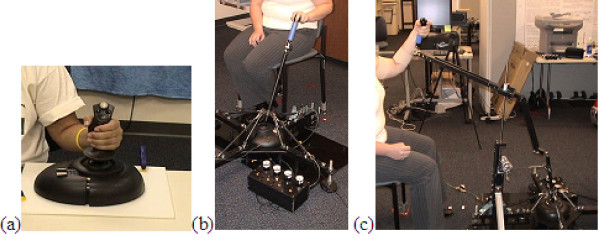
Methods: Three studies were conducted to evaluate the potential of the suite. A conventional force-reflecting joystick, a modified joystick therapy platform (TheraJoy), and a steering wheel platform (TheraDrive) were tested separately with the UniTherapy software. Stroke subjects with hemiparesis and able-bodied subjects completed tracking activities with the devices in different positions. We quantify motor performance across subject groups and across device platforms and muscle activation across devices at two positions in the arm workspace.
Results: Trends in the assessment metrics were consistent across devices with able-bodied and high functioning strokes subjects being significantly more accurate and quicker in their motor performance than low functioning subjects. Muscle activation patterns were different for shoulder and elbow across different devices and locations.
Conclusion: The Robot/CAMR suite has potential for stroke rehabilitation. By manipulating hardware and software variables, we can create personalized therapy environments that engage patients, address their therapy need, and track their progress. A larger longitudinal study is still needed to evaluate these systems in under-supervised environments such as the home.
Figures







Similar articles
-
A mobile robot therapist for under-supervised training with robot/computer assisted motivating systems.Annu Int Conf IEEE Eng Med Biol Soc. 2008;2008:4511-4. doi: 10.1109/IEMBS.2008.4650215. Annu Int Conf IEEE Eng Med Biol Soc. 2008. PMID: 19163718
-
A pilot study evaluating use of a computer-assisted neurorehabilitation platform for upper-extremity stroke assessment.J Neuroeng Rehabil. 2009 May 28;6:15. doi: 10.1186/1743-0003-6-15. J Neuroeng Rehabil. 2009. PMID: 19476637 Free PMC article.
-
Design strategies to improve patient motivation during robot-aided rehabilitation.J Neuroeng Rehabil. 2007 Feb 19;4:3. doi: 10.1186/1743-0003-4-3. J Neuroeng Rehabil. 2007. PMID: 17309790 Free PMC article. Clinical Trial.
-
An overview of robotic/mechanical devices for post-stroke thumb rehabilitation.Disabil Rehabil Assist Technol. 2018 Oct;13(7):683-703. doi: 10.1080/17483107.2018.1425746. Epub 2018 Jan 15. Disabil Rehabil Assist Technol. 2018. PMID: 29334274 Review.
-
Robot-assisted rehabilitation of hand function.Curr Opin Neurol. 2010 Dec;23(6):661-70. doi: 10.1097/WCO.0b013e32833e99a4. Curr Opin Neurol. 2010. PMID: 20852421 Review.
Cited by
-
Technology-assisted training of arm-hand skills in stroke: concepts on reacquisition of motor control and therapist guidelines for rehabilitation technology design.J Neuroeng Rehabil. 2009 Jan 20;6:1. doi: 10.1186/1743-0003-6-1. J Neuroeng Rehabil. 2009. PMID: 19154570 Free PMC article. Review.
-
Post-stroke rehabilitation in the peri-pandemic COVID-19 era.Rheumatol Int. 2024 Mar;44(3):399-411. doi: 10.1007/s00296-023-05520-1. Epub 2024 Jan 23. Rheumatol Int. 2024. PMID: 38253904 Review.
-
Advances in upper limb stroke rehabilitation: a technology push.Med Biol Eng Comput. 2011 Oct;49(10):1103-18. doi: 10.1007/s11517-011-0797-0. Epub 2011 Jul 20. Med Biol Eng Comput. 2011. PMID: 21773806 Review.
-
Robotic/virtual reality intervention program individualized to meet the specific sensorimotor impairments of an individual patient: a case study.Int J Disabil Hum Dev. 2014 Sep;13(3):401-407. doi: 10.1515/ijdhd-2014-0334. Epub 2014 Aug 5. Int J Disabil Hum Dev. 2014. PMID: 29057196 Free PMC article.
-
Robots integrated with virtual reality simulations for customized motor training in a person with upper extremity hemiparesis: a case study.J Neurol Phys Ther. 2012 Jun;36(2):79-86. doi: 10.1097/NPT.0b013e3182566f3f. J Neurol Phys Ther. 2012. PMID: 22592063 Free PMC article.
References
-
- Heart Disease and Stroke Statistics – 2005 Update. Dallas, TX: American Heart Association. 2005.
-
- Angeleri F, Angeleri VA, Foschi N, Giaquinto S, Nolfe G. The influence of depression, social activity, and family stress on outcome after stroke. Stroke. 1993;24:1478–1483. - PubMed
-
- Maclean N, Pound P. A critical review of the concept of patient motivation in the literature on physical rehabilitation. Soc Sci Med. 2000;50:495–506. - PubMed
-
- Trombly CA, Ma HI. A synthesis of the effects of occupational therapy for persons with stroke, Part I: Restoration of roles, tasks, and activities. Am J Occup Ther. 2002;56:250–9. - PubMed
-
- Volpe BT, Krebs HI, Hogan N. Robot-aided sensorimotor training in stroke rehabilitation. Adv Neurol. 2003;92:429–33. - PubMed
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
Medical
