

Feedback control in active sensing: rat exploratory whisking is modulated by environmental contact
- PMID: 17331893
- PMCID: PMC2124479
- DOI: 10.1098/rspb.2006.0347
Feedback control in active sensing: rat exploratory whisking is modulated by environmental contact
Abstract
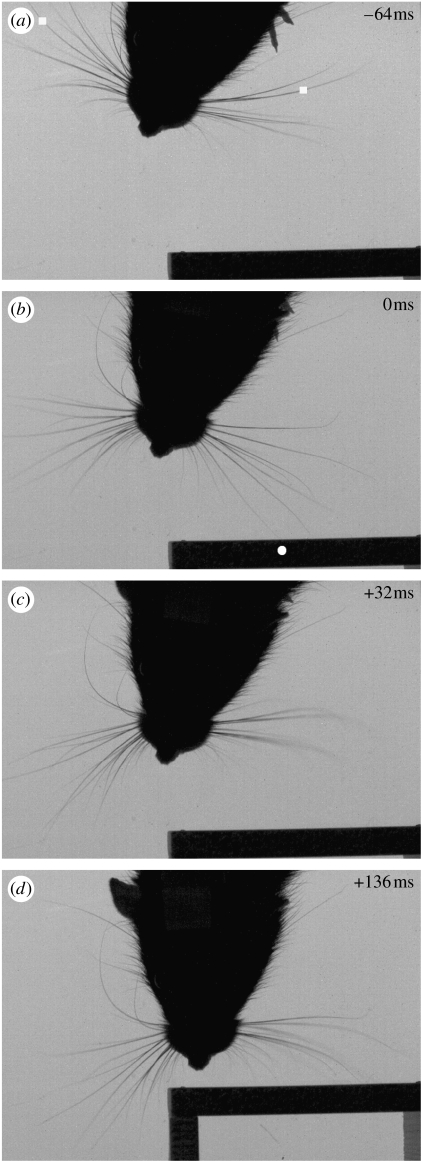
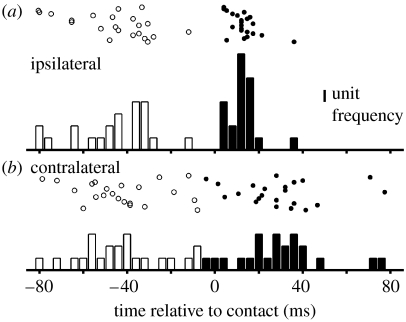
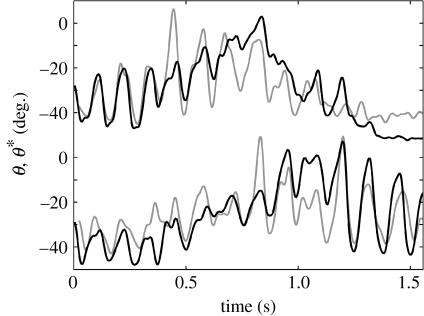
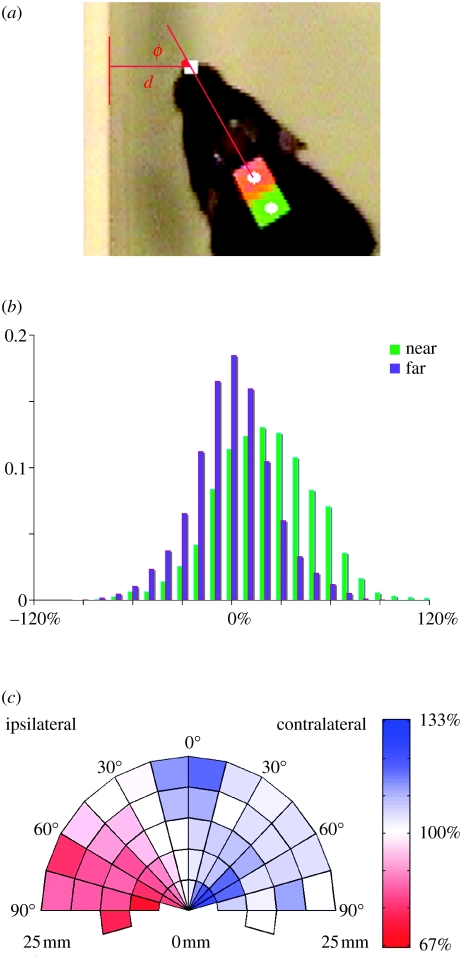
Rats sweep their facial whiskers back and forth to generate tactile sensory information through contact with environmental structure. The neural processes operating on the signals arising from these whisker contacts are widely studied as a model of sensing in general, even though detailed knowledge of the natural circumstances under which such signals are generated is lacking. We used digital video tracking and wireless recording of mystacial electromyogram signals to assess the effects of whisker-object contact on whisking in freely moving animals exploring simple environments. Our results show that contact leads to reduced protraction (forward whisker motion) on the side of the animal ipsilateral to an obstruction and increased protraction on the contralateral side. Reduced ipsilateral protraction occurs rapidly and in the same whisk cycle as the initial contact. We conclude that whisker movements are actively controlled so as to increase the likelihood of environmental contacts while constraining such interactions to involve a gentle touch. That whisking pattern generation is under strong feedback control has important implications for understanding the nature of the signals reaching upstream neural processes.
Figures
References
-
- Ahissar E, Arieli A. Figuring space by time. Neuron. 2001;32:185–201. doi:10.1016/S0896-6273(01)00466-4 - DOI - PubMed
-
- Aloimonos J.Y, Weiss I, Bandopadhay A. Active vision. Int. J. Comput. Vis. 1988;1:333–356. doi:10.1007/BF00133571 - DOI
-
- Arabzadeh E, Zorzin E, Diamond M.E. Neuronal encoding of texture in the whisker sensory pathway. PLoS Biol. 2005;3:e17. doi:10.1371/journal.pbio.0030017 - DOI - PMC - PubMed
-
- Ballard D.H. Animate vision. Artif. Intell. 1991;48:57–96. doi:10.1016/0004-3702(91)90080-4 - DOI
-
- Berg R.W, Kleinfeld D. Rhythmic whisking by rat: retraction as well as protraction of the vibrissae is under active muscular control. J. Neurophysiol. 2003;89:104–117. doi:10.1152/jn.00600.2002 - DOI - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Molecular Biology Databases