

Stochastic estimation of arm mechanical impedance during robotic stroke rehabilitation
- PMID: 17436881
- PMCID: PMC2752649
- DOI: 10.1109/TNSRE.2007.891392
Stochastic estimation of arm mechanical impedance during robotic stroke rehabilitation
Abstract
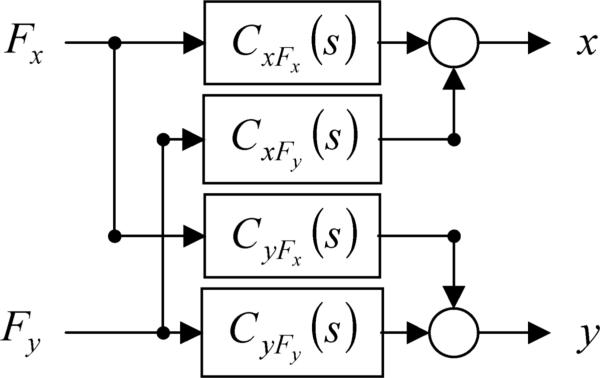
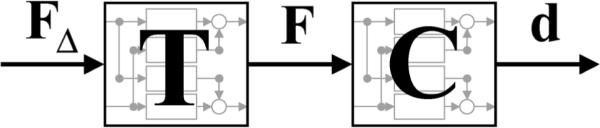
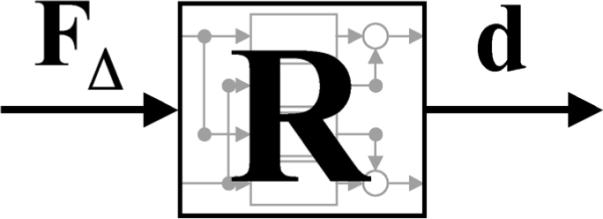
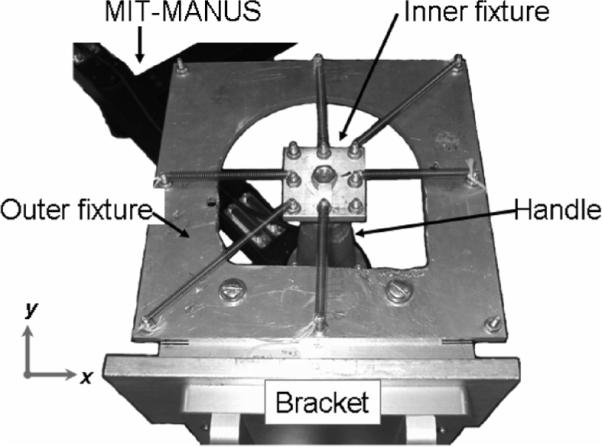
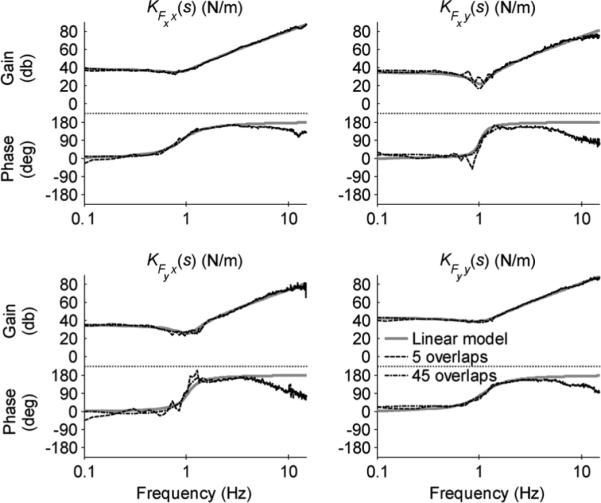
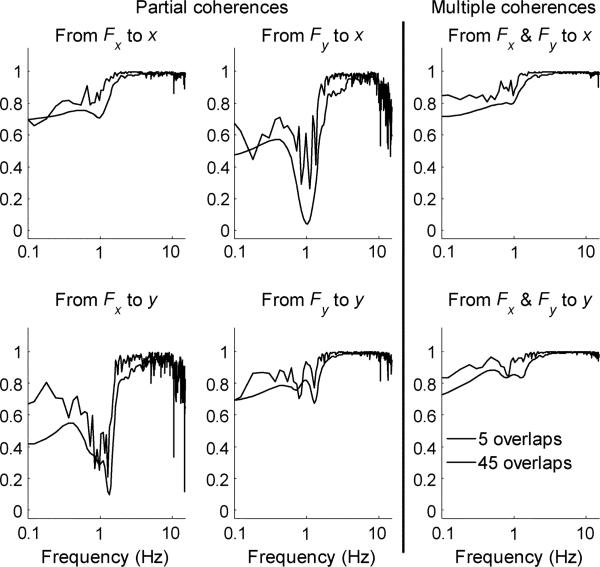
This paper presents a stochastic method to estimate the multijoint mechanical impedance of the human arm suitable for use in a clinical setting, e.g., with persons with stroke undergoing robotic rehabilitation for a paralyzed arm. In this context, special circumstances such as hypertonicity and tissue atrophy due to disuse of the hemiplegic limb must be considered. A low-impedance robot was used to bring the upper limb of a stroke patient to a test location, generate force perturbations, and measure the resulting motion. Methods were developed to compensate for input signal coupling at low frequencies apparently due to human-machine interaction dynamics. Data was analyzed by spectral procedures that make no assumption about model structure. The method was validated by measuring simple mechanical hardware and results from a patient's hemiplegic arm are presented.
Figures
References
-
- Krebs HI, Palazzolo JJ, Dipietro L, Ferraro M, Krol J, Rannekleiv K, Volpe BT, Hogan N. Rehabilitation robotics: Performance-based progressive robot-assisted therapy. Auton. Robot. 2003;15(1):7–20.
-
- Ferraro M, Palazzolo JJ, Krol J, Krebs HI, Hogan N, Volpe BT. Robot-aided sensorimotor arm training improves outcome in patients with chronic stroke. Neurology. 2003;61(11):1604–1607. - PubMed
-
- Encyclopaedia Britannica, Nervous system disease [Online] Available: http://www.search.eb.com/eb/article?tocId=225715.
-
- Ashworth B. Preliminary trial of carisoprodol on minimal to moderate spasticity in multiple sclerosis. Practioner. 1964;192:540–542. - PubMed
-
- Bohannon RW, Smith MB. Interrater reliability of a modified ashworth scale of muscle spasticity. Phys. Ther. 1987;67(2):206–207. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Medical
