

The optimal controller delay for myoelectric prostheses
- PMID: 17436883
- PMCID: PMC8173529
- DOI: 10.1109/TNSRE.2007.891391
The optimal controller delay for myoelectric prostheses
Abstract
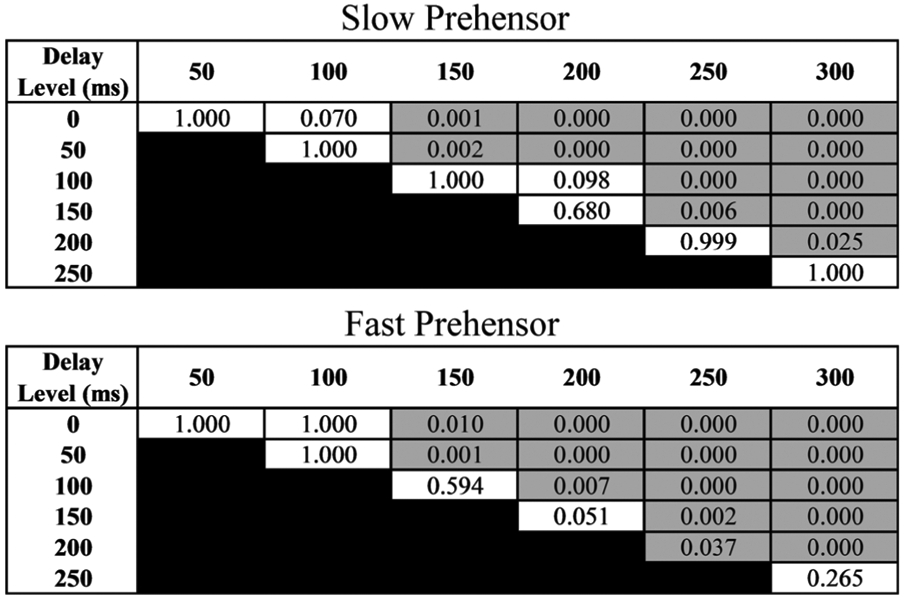
A tradeoff exists when considering the delay created by multifunctional prosthesis controllers. Large controller delays maximize the amount of time available for EMG signal collection and analysis (and thus maximize classification accuracy); however, large delays also degrade prosthesis performance by decreasing the responsiveness of the prosthesis. To elucidate an "optimal controller delay" twenty able-bodied subjects performed the Box and Block Test using a device called PHABS (prosthetic hand for able bodied subjects). Tests were conducted with seven different levels of controller delay ranging from nearly 0-300 ms and with two different artificial hand speeds. Based on repeted measures ANOVA analysis and a linear mixed effects model, the optimal controller delay was found to range between approximately 100 ms for fast prehensors and 125 ms for slower prehensors. Furthermore, the linear mixed effects model shows that there is a linear degradation in performance with increasing delay.
Figures






References
-
- Englehart K, Hudgins B, and Parker PA, “A wavelet-based continuous classification scheme for multifunction myoelectric control,” IEEE Trans. Biomed. Eng, vol. 48, no. 3, pp. 302–311, March. 2001. - PubMed
-
- Du S and Vuskovic MI, “Temporal vs. spectral approach to feature extraction from prehensile EMG signals,” in Proc. IEEE Int. Conf. Inf. Reuse Integration, November. 8-10, 2004, pp. 344–350.
-
- Yamada M, Niwa N, and Uchiyama A, “Evaluation of a multifunctional hand prosthesis system using EMG controlled animation,” IEEE Trans. Biomed. Eng, vol. 30, pp. 759–763, 1983. - PubMed
-
- Hogan N, “A review of the methods of processing EMG for use as a proportional control signal,” Biomed. Eng, vol. 11, pp. 81–86, 1976. - PubMed
-
- Kyberd PJ, Holland OE, Chappell PH, Smith S, Tregidgo R, Bagwell PJ, and Snaith M, “MARCUS: A two degree of freedom hand prosthesis with hierarchical grip control,” IEEE Trans. Rehabil. Eng, vol. 3, no. 1, pp. 70–76, March. 1995.
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
Medical
