

Inter-joint coupling effects on muscle contributions to endpoint force and acceleration in a musculoskeletal model of the cat hindlimb
- PMID: 17640652
- PMCID: PMC4346316
- DOI: 10.1016/j.jbiomech.2007.06.001
Inter-joint coupling effects on muscle contributions to endpoint force and acceleration in a musculoskeletal model of the cat hindlimb
Abstract
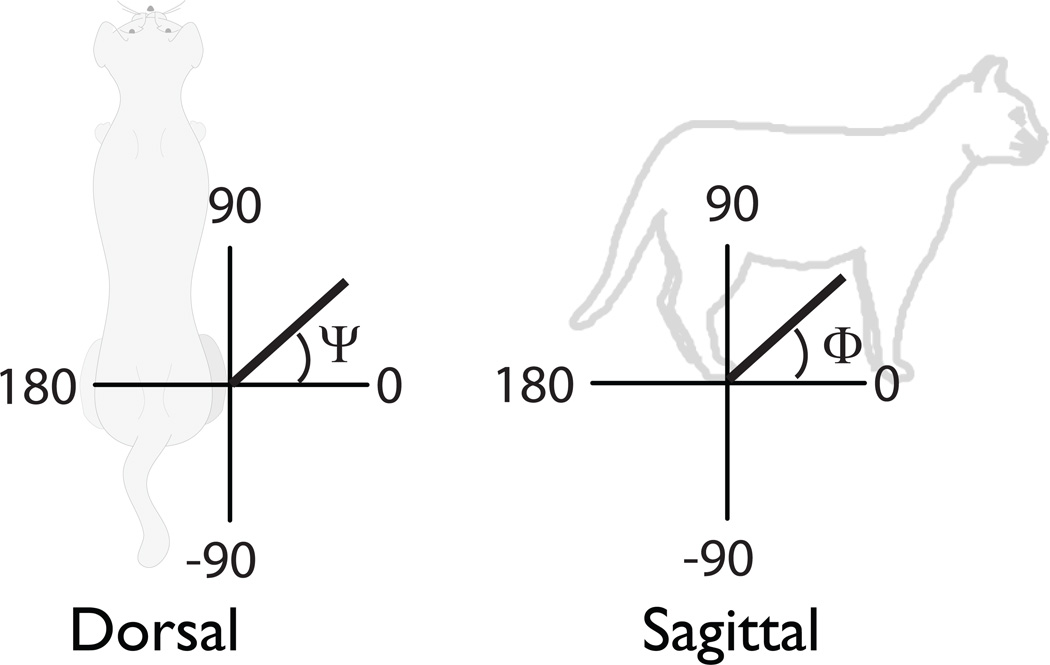
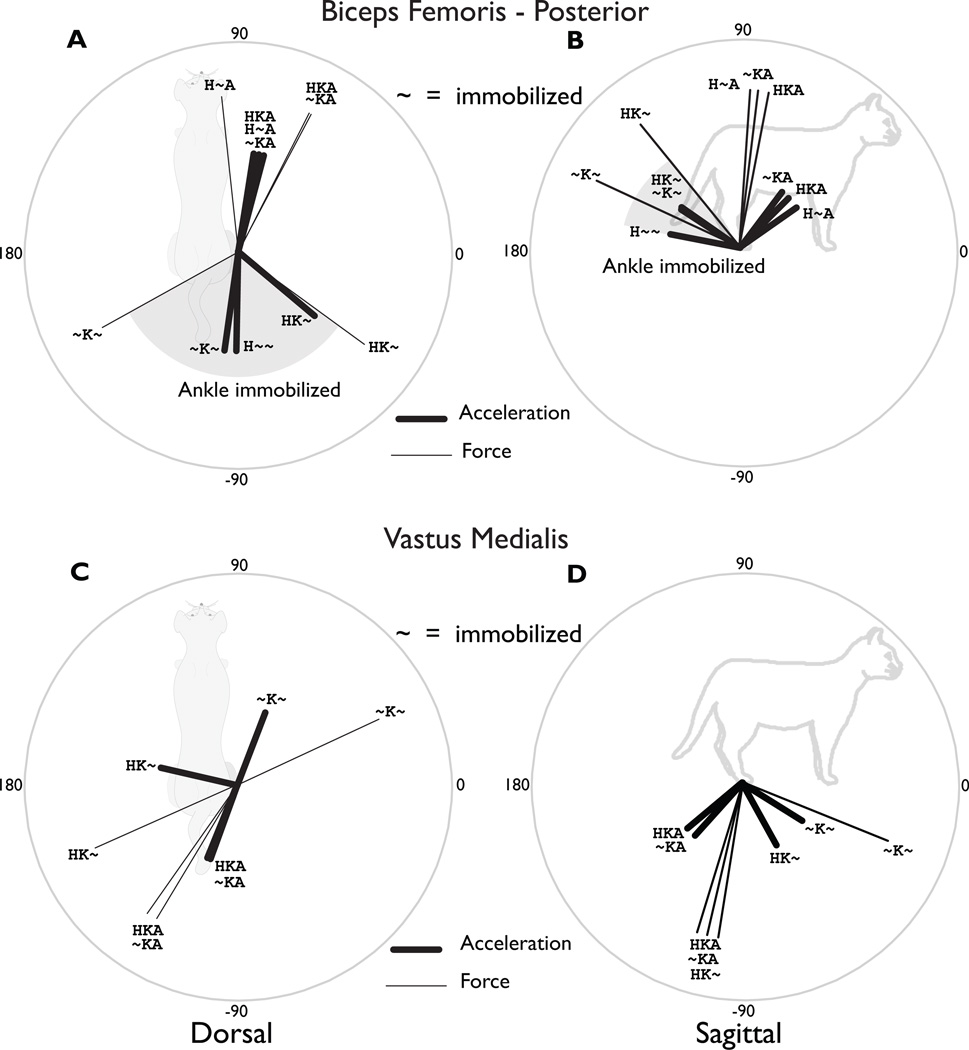
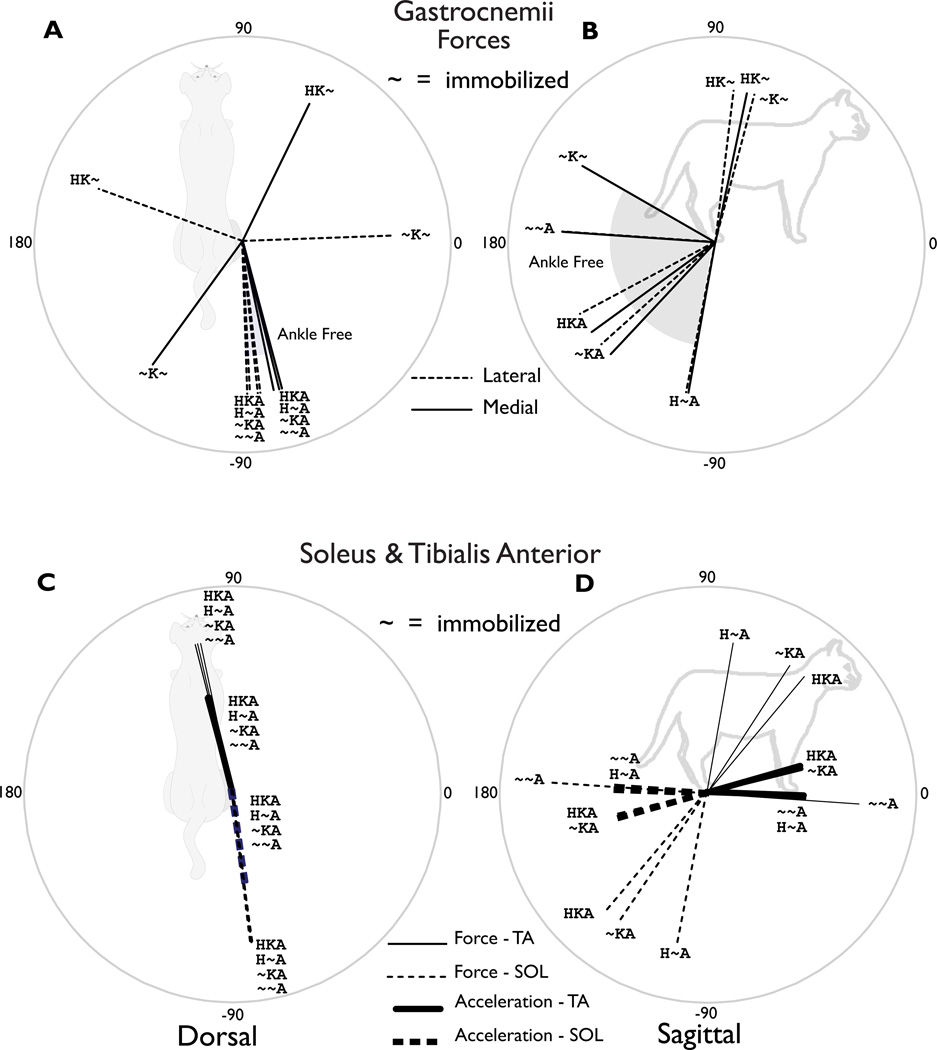
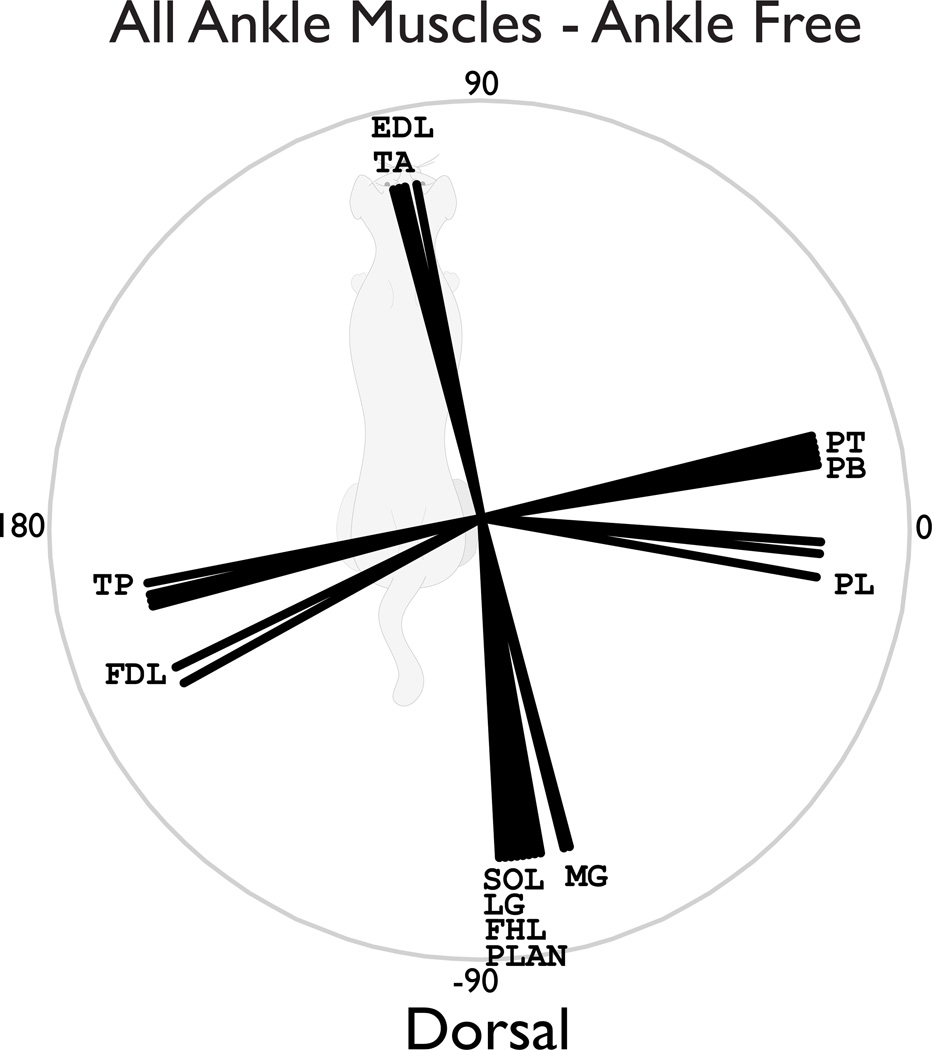
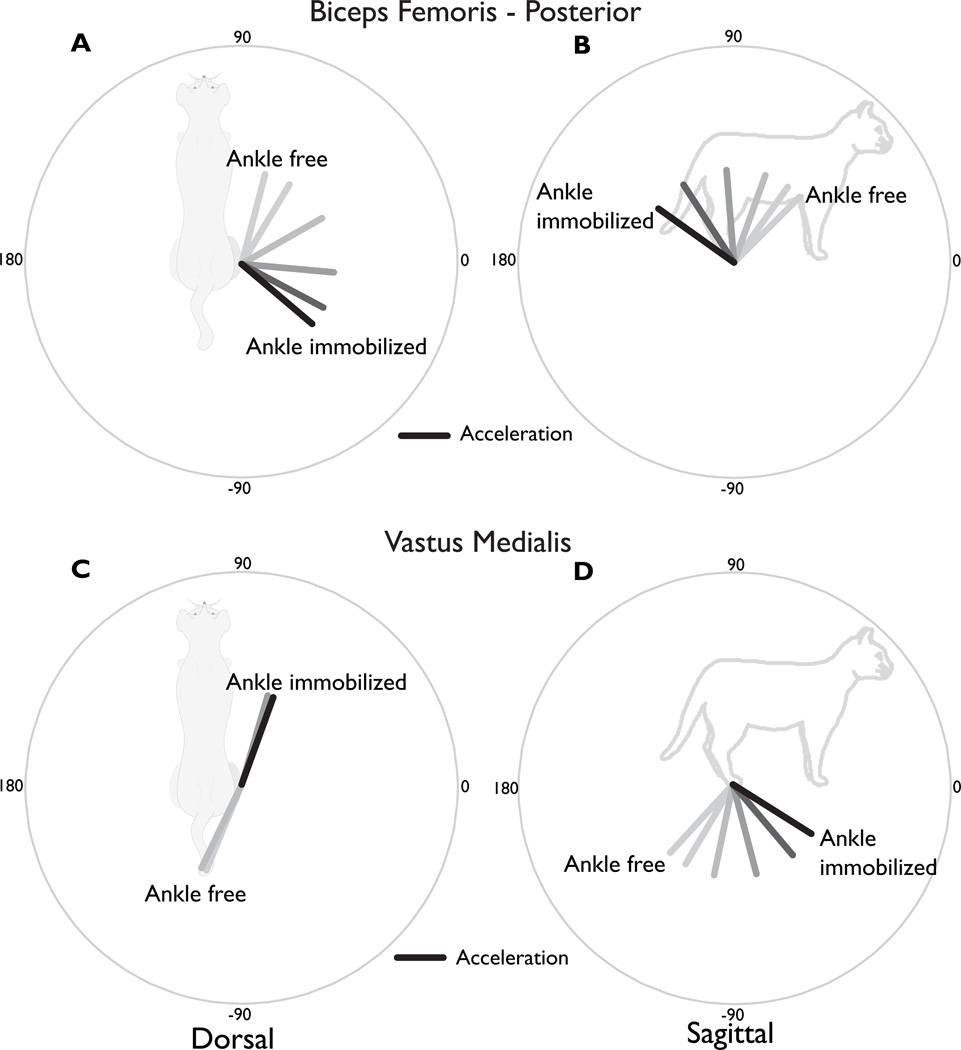
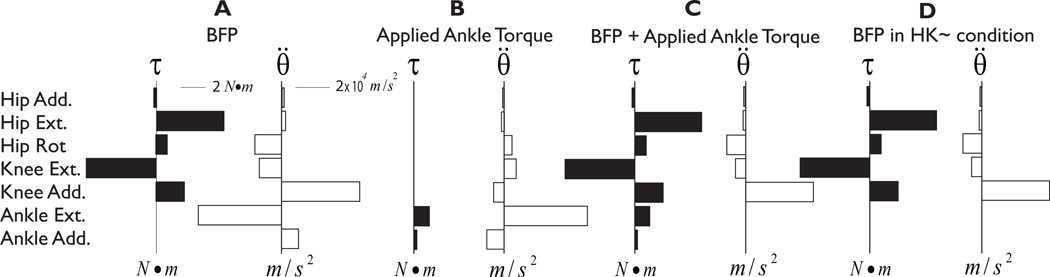
The biomechanical principles underlying the organization of muscle activation patterns during standing balance are poorly understood. The goal of this study was to understand the influence of biomechanical inter-joint coupling on endpoint forces and accelerations induced by the activation of individual muscles during postural tasks. We calculated induced endpoint forces and accelerations of 31 muscles in a 7 degree-of-freedom, three-dimensional model of the cat hindlimb. To test the effects of inter-joint coupling, we systematically immobilized the joints (excluded kinematic degrees of freedom) and evaluated how the endpoint force and acceleration directions changed for each muscle in 7 different conditions. We hypothesized that altered inter-joint coupling due to joint immobilization of remote joints would substantially change the induced directions of endpoint force and acceleration of individual muscles. Our results show that for most muscles crossing the knee or the hip, joint immobilization altered the endpoint force or acceleration direction by more than 90 degrees in the dorsal and sagittal planes. Induced endpoint forces were typically consistent with behaviorally observed forces only when the ankle was immobilized. We then activated a proximal muscle simultaneous with an ankle torque of varying magnitude, which demonstrated that the resulting endpoint force or acceleration direction is modulated by the magnitude of the ankle torque. We argue that this simple manipulation can lend insight into the functional effects of co-activating muscles. We conclude that inter-joint coupling may be an essential biomechanical principle underlying the coordination of proximal and distal muscles to produce functional endpoint actions during motor tasks.
Figures
References
-
- Abelew TA, Huyghues-Despointes CMJI, Nichols TR. Three dimensional knee torques produced by the quadriceps and hamstrings muscles in the cat. 1996
-
- Anderson FC, Goldberg SR, Pandy MG, Delp SL. Contributions of muscle forces and toe-off kinematics to peak knee flexion during the swing phase of normal gait: an induced position analysis. Journal of Biomechanics. 2004;37(5):731–737. - PubMed
-
- Bernstein N. The Coordination and Regulation of Movements. New York: Pergamon Press; 1967.
-
- Biewener AA, Konieczynski DD, Baudinette RV. In vivo muscle force-length behavior during steady-speed hopping in tammar wallabies. J Exp Biol. 1998;201(Pt 11):1681–1694. - PubMed
-
- Bonasera SJ, Nichols TR. Mechanical actions of heterogenic reflexes among ankle stabilizers and their interactions with plantarflexors of the cat hindlimb. J Neurophysiol. 1996;75(5):2050–2070. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Medical
Miscellaneous
