

Contributions of muscles to terminal-swing knee motions vary with walking speed
- PMID: 17659289
- PMCID: PMC2795577
- DOI: 10.1016/j.jbiomech.2007.06.006
Contributions of muscles to terminal-swing knee motions vary with walking speed
Abstract
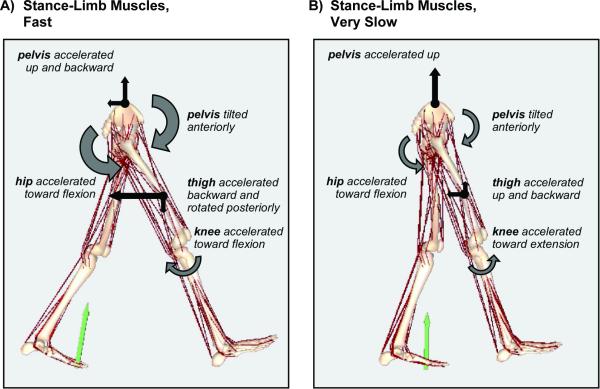
Many children with cerebral palsy walk with diminished knee extension during terminal swing, at speeds much slower than unimpaired children. Treatment of these gait abnormalities is challenging because the factors that extend the knee during normal walking, over a range of speeds, are not well understood. This study analyzed a series of three-dimensional, muscle-driven dynamic simulations to determine whether the relative contributions of individual muscles and other factors to angular motions of the swing-limb knee vary with walking speed. Simulations were developed that reproduced the measured gait dynamics of seven unimpaired children walking at self-selected, fast, slow, and very slow speeds (7 subjects x 4 speeds=28 simulations). In mid-swing, muscles on the stance limb made the largest net contribution to extension of the swing-limb knee at all speeds examined. The stance-limb hip abductors, in particular, accelerated the pelvis upward, inducing reaction forces at the swing-limb hip that powerfully extended the knee. Velocity-related forces (i.e., Coriolis and centrifugal forces) also contributed to knee extension in mid-swing, though these contributions were diminished at slower speeds. In terminal swing, the hip flexors and other muscles on the swing-limb decelerated knee extension at the subjects' self-selected, slow, and very slow speeds, but had only a minimal net effect on knee motions at the fastest speeds. Muscles on the stance limb helped brake knee extension at the subjects' fastest speeds, but induced a net knee extension acceleration at the slowest speeds. These data--which show that the contributions of muscular and velocity-related forces to terminal-swing knee motions vary systematically with walking speed--emphasize the need for speed-matched control subjects when attempting to determine the causes of a patient's abnormal gait.
Figures










References
-
- Anderson FC, Goldberg SR, Pandy MG, Delp SL. Contributions of muscle forces and toe-off kinematics to peak knee flexion during the swing phase of normal gait: an induced position analysis. Journal of Biomechanics. 2004;37:731–737. - PubMed
-
- Andersson EA, Nilsson J, Thorstensson A. Intramuscular EMG from the hip flexor muscles during human locomotion. Acta Physiologica Scandinavica. 1997;161:361–370. - PubMed
-
- Arnold AS, Anderson FC, Pandy MG, Delp SL. Muscular contributions to hip and knee extension during the single limb stance phase of normal gait: a framework for investigating the causes of crouch gait. Journal of Biomechanics. 2005;38:2181–2189. - PubMed
-
- Chen G. Induced acceleration contributions to locomotion dynamics are not physically well defined. Gait and Posture. 2006;23:37–44. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
