

Adjustments to local friction in multifinger prehension
- PMID: 17664170
- PMCID: PMC2827032
- DOI: 10.3200/JMBR.39.4.276-290
Adjustments to local friction in multifinger prehension
Abstract
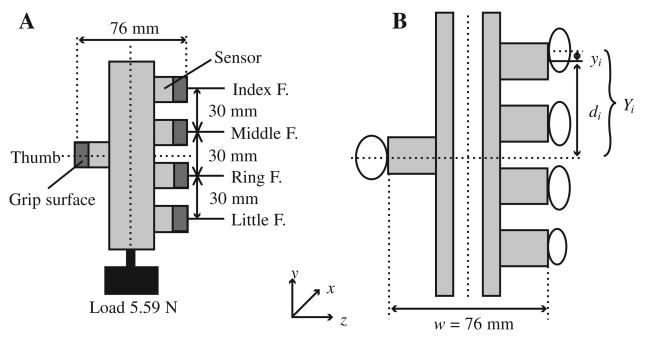
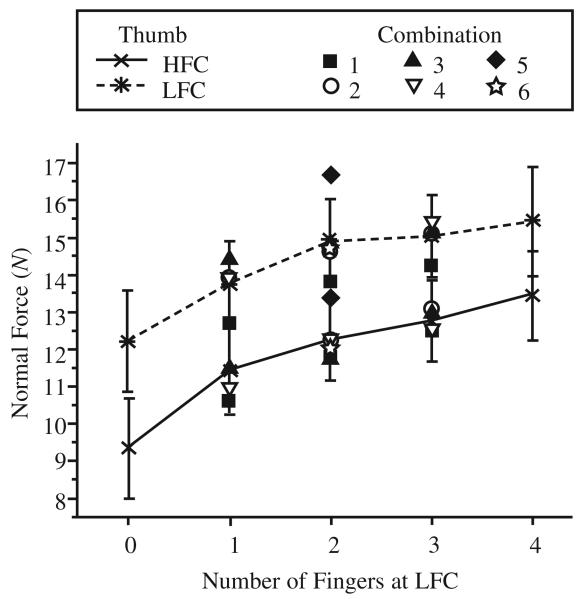
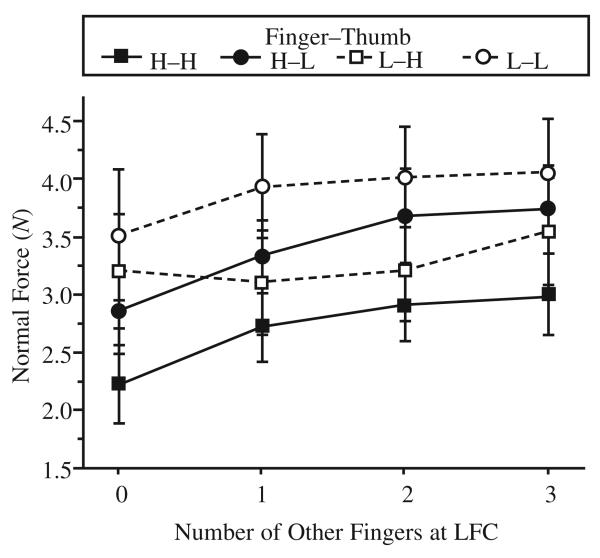
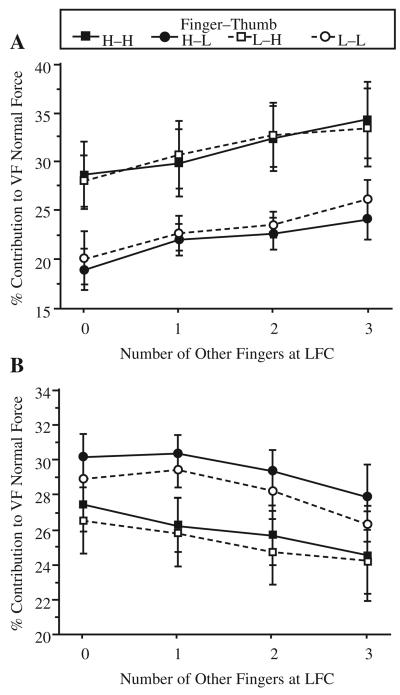
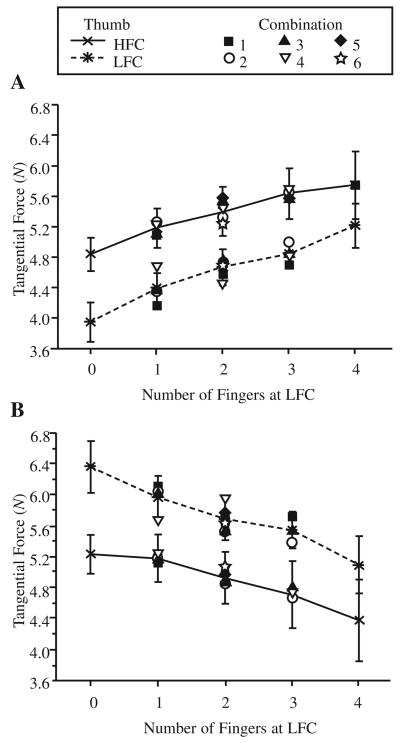
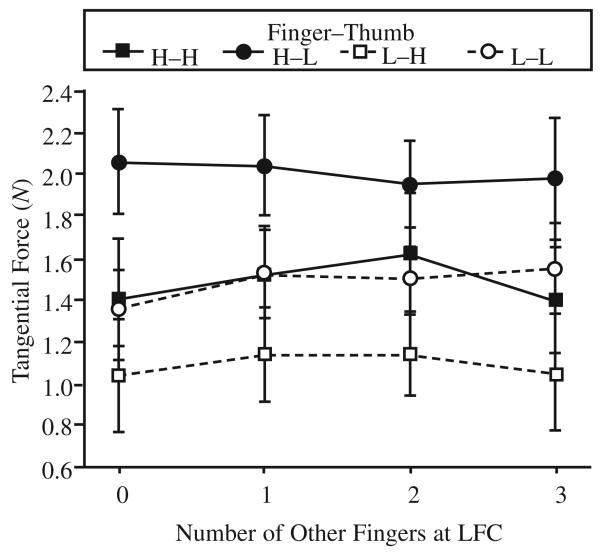
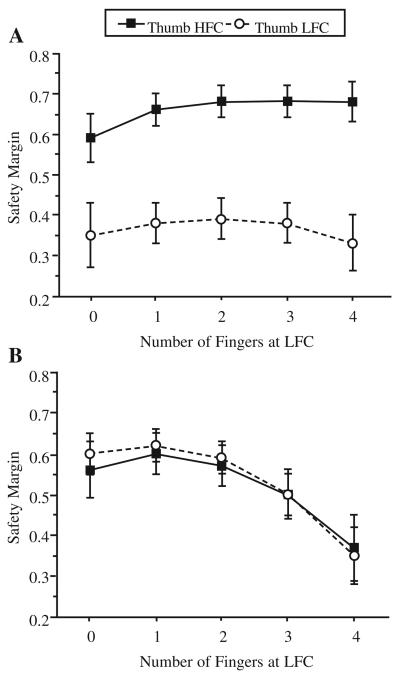
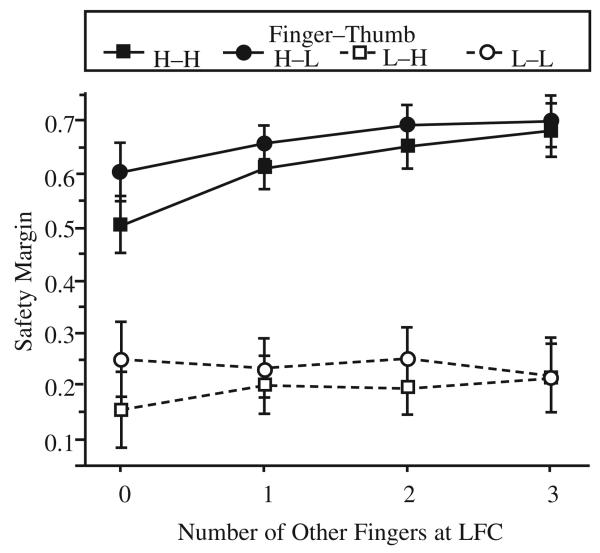
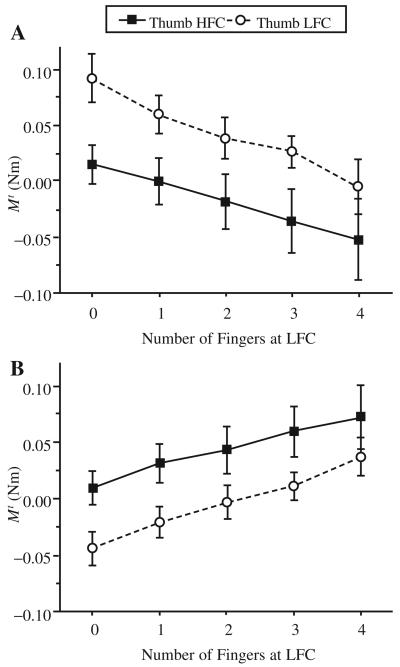
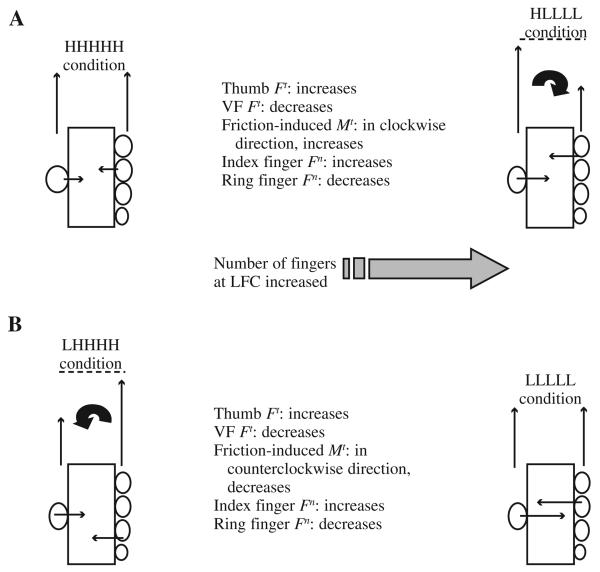
The authors studied the effects of surface friction at the digit-object interface on digit forces and moments when 12 participants statically held an object in a 5-digit grasp. The authors changed low-friction contact (LFC) with rayon and high-friction contact (HFC) with sandpaper independently for each digit in all 32 possible combinations. Normal forces of the thumb and virtual finger (VF), an imagined finger with a mechanical effect equal to that of the 4 fingers, increased with the thumb at LFC or with an increase in the number of fingers at LFC. When the thumb was at LFC, the thumb tangential force decreased. The VF tangential force decreased when the number of fingers at LFC increased. The interaction of the local responses to friction and the synergic responses necessary to maintain the equilibrium explain the coordination of individual digit forces.
Figures
References
-
- Arbib MA, Iberall T, Lyons D. Coordinated control programs for movements of the hand. In: Goodwin AW, Darian-Smith I, editors. Hand function and the neocortex. Springer; Berlin: 1985. pp. 111–129.
-
- Baud-Bovy G, Soechting JF. Two virtual fingers in the control of the tripod grasp. Journal of Neurophysiology. 2001;86:604–615. - PubMed
-
- Bernstein NA. The co-ordination and regulation of movements. Pergamon Press; London: 1967.
-
- Burstedt MK, Edin BB, Johansson RS. Coordination of fingertip forces during human manipulation can emerge from independent neural networks controlling each engaged digit. Experimental Brain Research. 1997;117:67–79. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources