

Varying environments can speed up evolution
- PMID: 17698964
- PMCID: PMC1948871
- DOI: 10.1073/pnas.0611630104
Varying environments can speed up evolution
Abstract
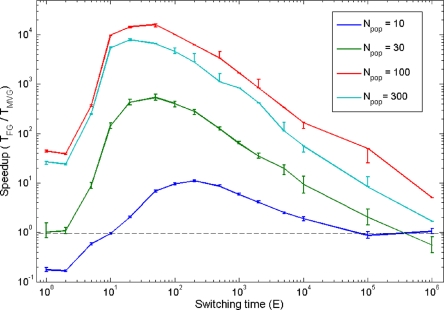
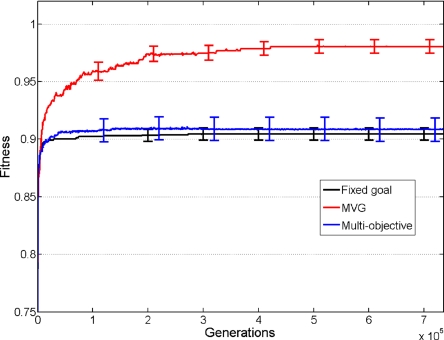
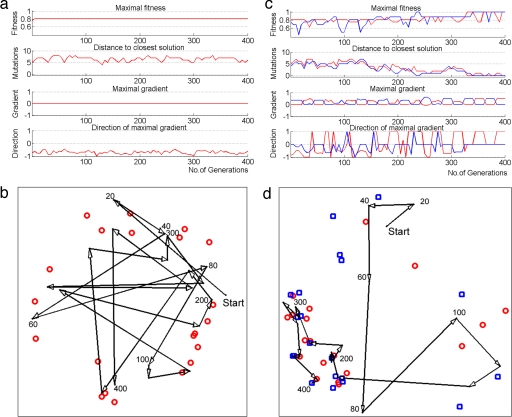
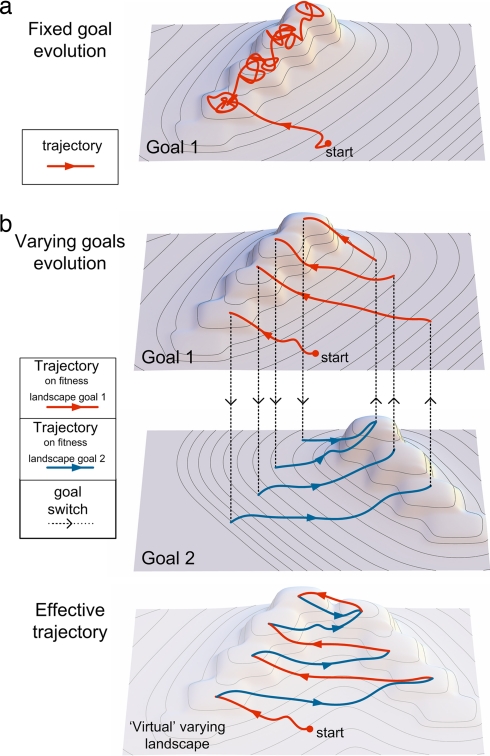
Simulations of biological evolution, in which computers are used to evolve systems toward a goal, often require many generations to achieve even simple goals. It is therefore of interest to look for generic ways, compatible with natural conditions, in which evolution in simulations can be speeded. Here, we study the impact of temporally varying goals on the speed of evolution, defined as the number of generations needed for an initially random population to achieve a given goal. Using computer simulations, we find that evolution toward goals that change over time can, in certain cases, dramatically speed up evolution compared with evolution toward a fixed goal. The highest speedup is found under modularly varying goals, in which goals change over time such that each new goal shares some of the subproblems with the previous goal. The speedup increases with the complexity of the goal: the harder the problem, the larger the speedup. Modularly varying goals seem to push populations away from local fitness maxima, and guide them toward evolvable and modular solutions. This study suggests that varying environments might significantly contribute to the speed of natural evolution. In addition, it suggests a way to accelerate optimization algorithms and improve evolutionary approaches in engineering.
Conflict of interest statement
The authors declare no conflict of interest.
Figures

References
-
- Kirschner M, Gerhart JC. The Plausibility of Life: Resolving Darwin's Dilemma. London: Yale Univ Press; 2005.
-
- Eldredge N, Gould SJ. Science. 1997;276:338–341. - PubMed
-
- Elena SF, Cooper VS, Lenski RE. Science. 1996;272:1802–1804. - PubMed
-
- Gerhart J, Kirschner M. Cells, Embryos, and Evolution: Toward a Cellular and Developmental Understanding of Phenotypic Variation and Evolutionary Adaptability. Oxford: Blackwell; 1997.
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
