

Landscape as a model: the importance of geometry
- PMID: 17967050
- PMCID: PMC2041976
- DOI: 10.1371/journal.pcbi.0030200
Landscape as a model: the importance of geometry
Abstract
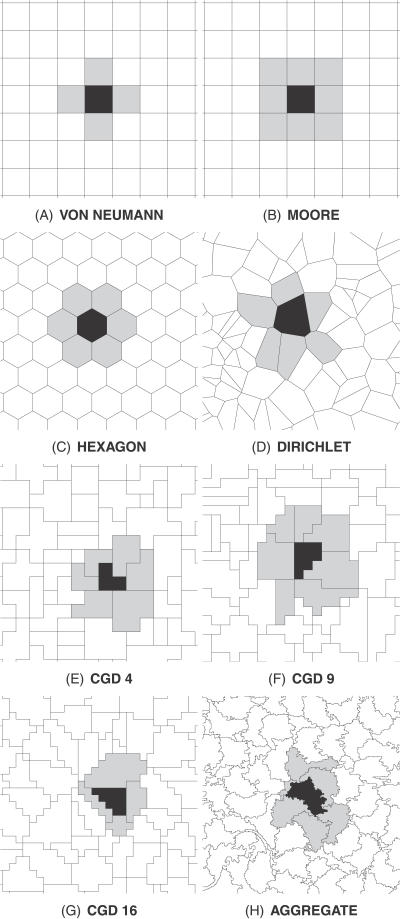
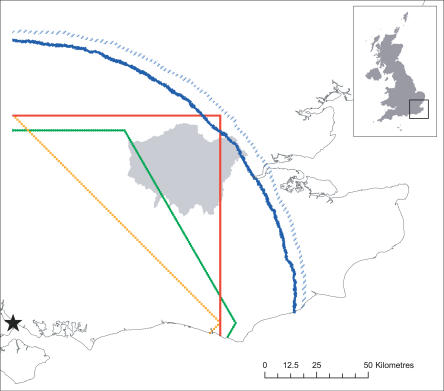
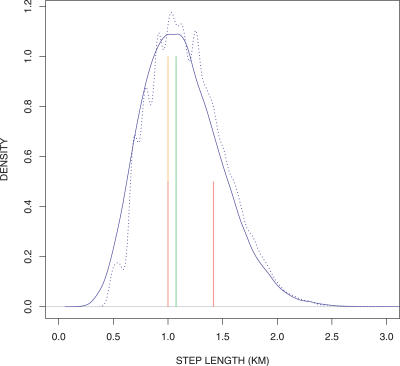
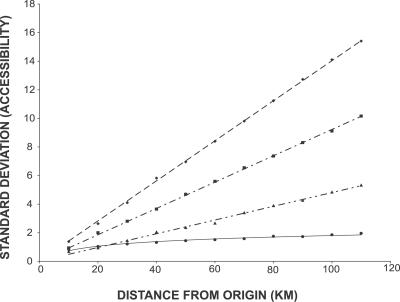
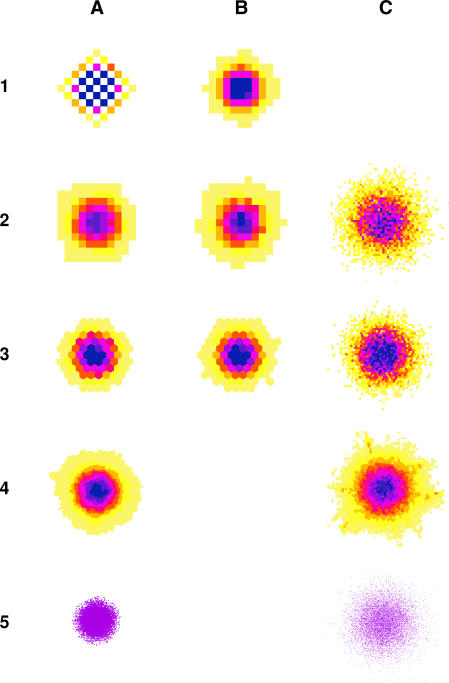
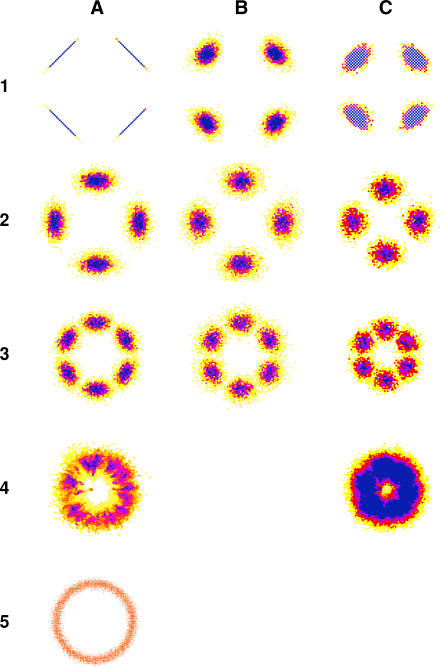
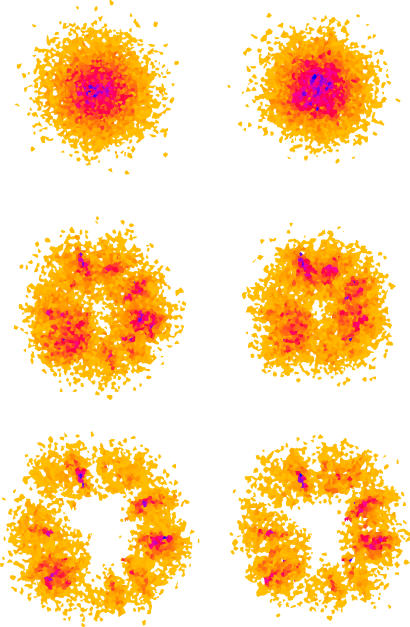
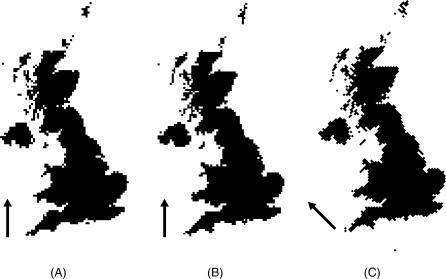
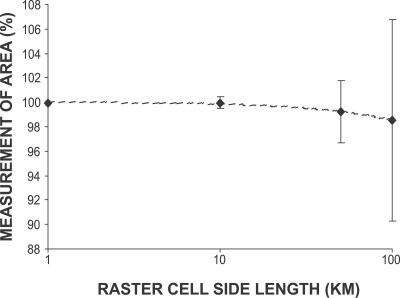
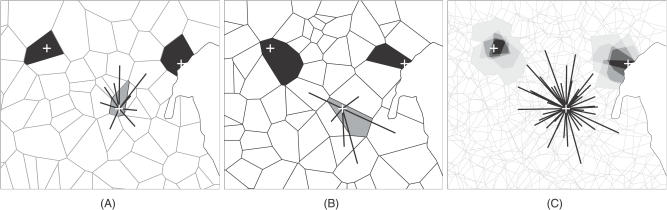
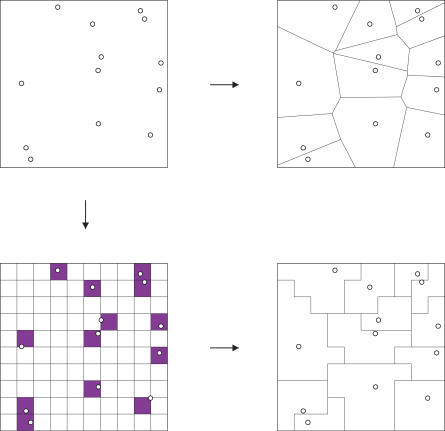
In all models, but especially in those used to predict uncertain processes (e.g., climate change and nonnative species establishment), it is important to identify and remove any sources of bias that may confound results. This is critical in models designed to help support decisionmaking. The geometry used to represent virtual landscapes in spatially explicit models is a potential source of bias. The majority of spatial models use regular square geometry, although regular hexagonal landscapes have also been used. However, there are other ways in which space can be represented in spatially explicit models. For the first time, we explicitly compare the range of alternative geometries available to the modeller, and present a mechanism by which uncertainty in the representation of landscapes can be incorporated. We test how geometry can affect cell-to-cell movement across homogeneous virtual landscapes and compare regular geometries with a suite of irregular mosaics. We show that regular geometries have the potential to systematically bias the direction and distance of movement, whereas even individual instances of landscapes with irregular geometry do not. We also examine how geometry can affect the gross representation of real-world landscapes, and again show that individual instances of regular geometries will always create qualitative and quantitative errors. These can be reduced by the use of multiple randomized instances, though this still creates scale-dependent biases. In contrast, virtual landscapes formed using irregular geometries can represent complex real-world landscapes without error. We found that the potential for bias caused by regular geometries can be effectively eliminated by subdividing virtual landscapes using irregular geometry. The use of irregular geometry appears to offer spatial modellers other potential advantages, which are as yet underdeveloped. We recommend their use in all spatially explicit models, but especially for predictive models that are used in decisionmaking.
Conflict of interest statement
Figures
Similar articles
-
SiMRiv: an R package for mechanistic simulation of individual, spatially-explicit multistate movements in rivers, heterogeneous and homogeneous spaces incorporating landscape bias.Mov Ecol. 2019 Apr 2;7:11. doi: 10.1186/s40462-019-0154-8. eCollection 2019. Mov Ecol. 2019. PMID: 30984401 Free PMC article.
-
Assessing the risk of invasive spread in fragmented landscapes.Risk Anal. 2004 Aug;24(4):803-15. doi: 10.1111/j.0272-4332.2004.00480.x. Risk Anal. 2004. PMID: 15357801
-
The application of local measures of spatial autocorrelation for describing pattern in north Australian landscapes.J Environ Manage. 2002 Jan;64(1):85-95. doi: 10.1006/jema.2001.0523. J Environ Manage. 2002. PMID: 11876077
-
Virtual Cell: computational tools for modeling in cell biology.Wiley Interdiscip Rev Syst Biol Med. 2012 Mar-Apr;4(2):129-40. doi: 10.1002/wsbm.165. Epub 2011 Dec 2. Wiley Interdiscip Rev Syst Biol Med. 2012. PMID: 22139996 Free PMC article. Review.
-
Quantitative cell biology with the Virtual Cell.Trends Cell Biol. 2003 Nov;13(11):570-6. doi: 10.1016/j.tcb.2003.09.002. Trends Cell Biol. 2003. PMID: 14573350 Review.
Cited by
-
Predicting the spatial expansion of an animal population with presence-only data.Ecol Evol. 2023 Nov 27;13(11):e10778. doi: 10.1002/ece3.10778. eCollection 2023 Nov. Ecol Evol. 2023. PMID: 38034327 Free PMC article.
-
Utilizing the density of inventory samples to define a hybrid lattice for species distribution models: DISTRIB-II for 135 eastern U.S. trees.Ecol Evol. 2019 Jul 17;9(15):8876-8899. doi: 10.1002/ece3.5445. eCollection 2019 Aug. Ecol Evol. 2019. PMID: 31410287 Free PMC article.
-
Emergency rabies control in a community of two high-density hosts.BMC Vet Res. 2012 Jun 18;8:79. doi: 10.1186/1746-6148-8-79. BMC Vet Res. 2012. PMID: 22709848 Free PMC article.
-
Voronoi tessellation captures very early clustering of single primary cells as induced by interactions in nascent biofilms.PLoS One. 2011;6(10):e26368. doi: 10.1371/journal.pone.0026368. Epub 2011 Oct 18. PLoS One. 2011. PMID: 22028865 Free PMC article.
-
The risk of foot-and-mouth disease becoming endemic in a wildlife host is driven by spatial extent rather than density.PLoS One. 2019 Jun 26;14(6):e0218898. doi: 10.1371/journal.pone.0218898. eCollection 2019. PLoS One. 2019. PMID: 31242228 Free PMC article.
References
-
- Lindenmayer DB, Fischer J, Hobbs R. The need for pluralism in landscape models: a reply to Dunn and Majer. Oikos. 2007;116:1419–1421.
-
- Wiens JA, Steneth NC, Van Horne B, Ims RA. Ecological mechanisms and landscape ecology. Oikos. 1993;66:369–380.
-
- Fuller RM, Smith GM, Sanderson JM, Hill JM, Thomson AG. The UK Land Cover Map 2000: construction of a parcel-based vector map from satellite images. Cartogr J. 2002;39:15–25.
-
- Kostova T, Carlsen T, Kercher J. Individual-based spatially-explicit model of an herbivore and its resource: the effect of habitat reduction and fragmentation. C R Biol. 2004;327:261–276. - PubMed
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
