

Optic flow drives human visuo-locomotor adaptation
- PMID: 18023350
- PMCID: PMC2228332
- DOI: 10.1016/j.cub.2007.10.059
Optic flow drives human visuo-locomotor adaptation
Abstract
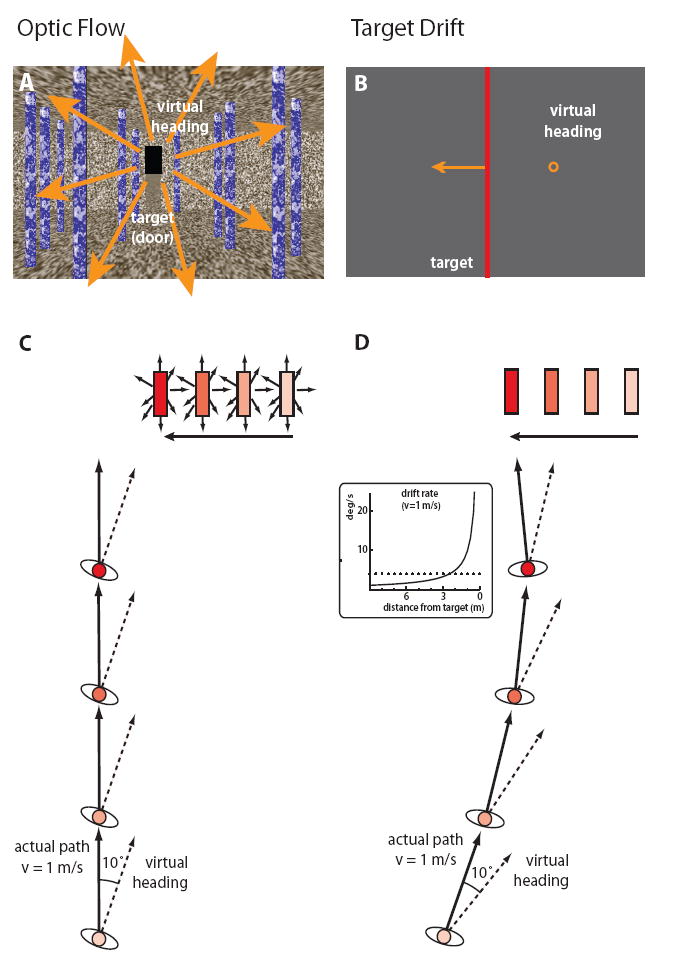
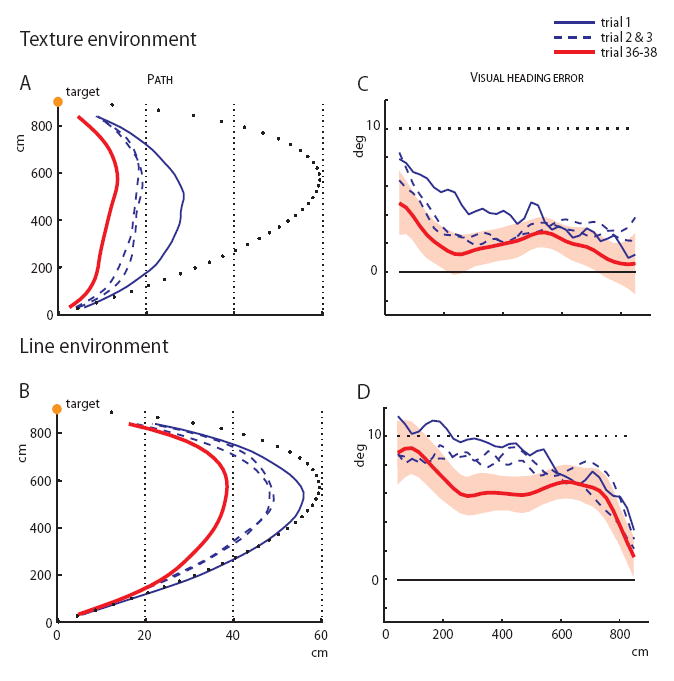
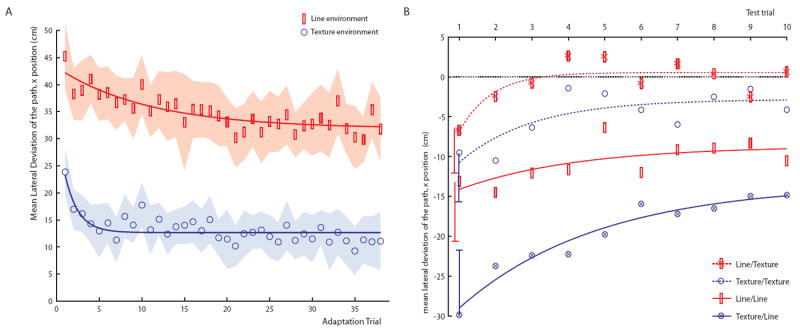
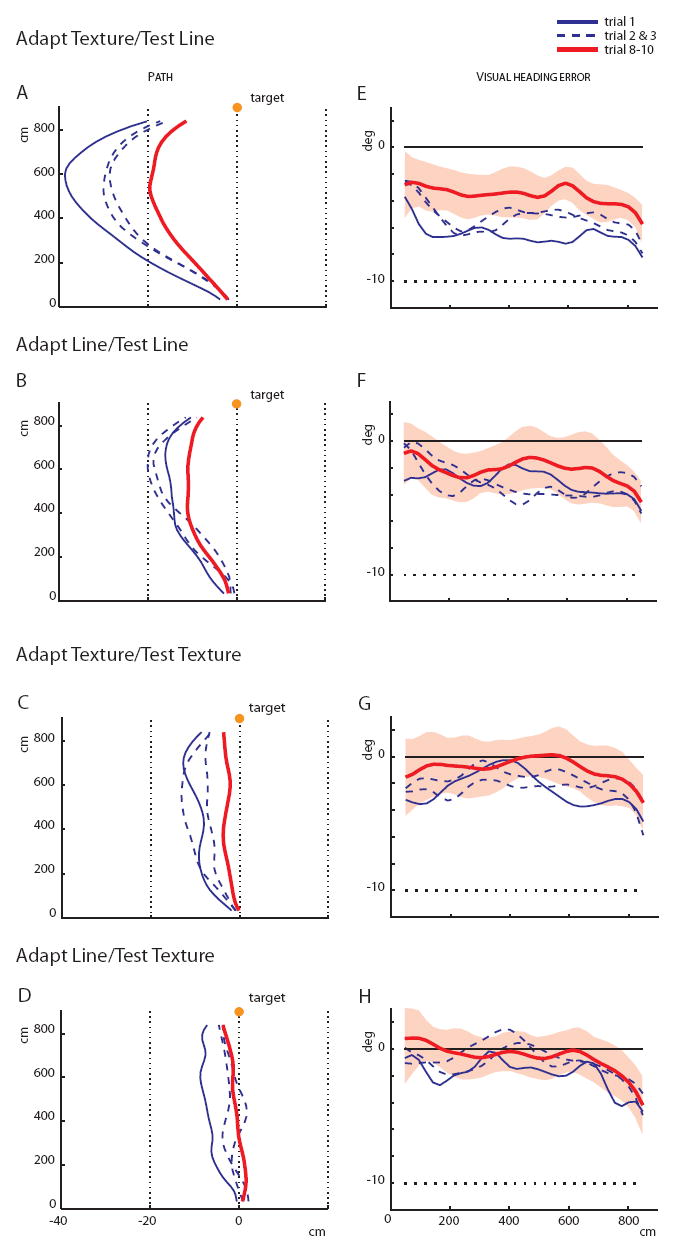
Two strategies can guide walking to a stationary goal: (1) the optic-flow strategy, in which one aligns the direction of locomotion or "heading" specified by optic flow with the visual goal; and (2) the egocentric-direction strategy, in which one aligns the locomotor axis with the perceived egocentric direction of the goal and in which error results in optical target drift. Optic flow appears to dominate steering control in richly structured visual environments, whereas the egocentric- direction strategy prevails in visually sparse environments. Here we determine whether optic flow also drives visuo-locomotor adaptation in visually structured environments. Participants adapted to walking with the virtual-heading direction displaced 10 degrees to the right of the actual walking direction and were then tested with a normally aligned heading. Two environments, one visually structured and one visually sparse, were crossed in adaptation and test phases. Adaptation of the walking path was more rapid and complete in the structured environment; the negative aftereffect on path deviation was twice that in the sparse environment, indicating that optic flow contributes over and above target drift alone. Optic flow thus plays a central role in both online control of walking and adaptation of the visuo-locomotor mapping.
Figures
Comment in
-
Perceptually guided action: a step in the right direction.Curr Biol. 2008 Jan 8;18(1):R36-7. doi: 10.1016/j.cub.2007.10.064. Curr Biol. 2008. PMID: 18177713
References
-
- Gibson JJ. The perception of the visual world. Boston: Houghton Mifflin; 1950.
-
- Warren WH, Kay BA, Zosh WD, Duchon AP, Sahuc S. Optic flow is used to control human walking. Nat Neurosci. 2001;4:213–216. - PubMed
-
- Rushton SK, Harris JM, Lloyd MR, Wann JP. Guidance of locomotion on foot uses perceived target location rather than optic flow. Curr Biol. 1998;8:1191–1194. - PubMed
-
- Rushton SK. Egocentric direction and locomotion. In: Lucia V, Beardsley SA, Rushton SK, editors. Optic flow and beyond. Dordrecht: Kluwer Academic Publishers; 2004. pp. 339–362.
-
- Llewellyn KR. Visual guidance of locomotion. J Exp Psychol. 1971;91:245–261. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
