

Review
doi: 10.1016/j.brainresrev.2007.08.004.
Epub 2007 Sep 5.
Combining modules for movement
Affiliations
- PMID: 18029291
- PMCID: PMC4295773
- DOI: 10.1016/j.brainresrev.2007.08.004
Item in Clipboard
Review
Combining modules for movement
Brain Res Rev.
2008 Jan.
Abstract
We review experiments supporting the hypothesis that the vertebrate motor system produces movements by combining a small number of units of motor output. Using a variety of approaches such as microstimulation of the spinal cord, NMDA iontophoresis, and an examination of natural behaviors in intact and deafferented animals we have provided evidence for a modular organization of the spinal cord. A module is a functional unit in the spinal cord that generates a specific motor output by imposing a specific pattern of muscle activation. Such an organization might help to simplify the production of movements by reducing the degrees of freedom that need to be specified.
Figures

Time-varying muscle synergies extracted from jumping, swimming, and walking muscle patterns in three frogs. Each synergy (columns W1 to W5) represents the activation time-course (in color code) of 13 muscles over 30 samples (300 ms total duration) normalized to the maximum sample of each muscle. (RI = rectus internus, AD = adductor magnus SM = semimembranosus, VI = the knee extensor vastus internus, VE = vastus externus, RA = rectus anterior, PE = the ankle extensors peroneus, GA = gastrocnemius, ST = mainly semitendinosus, SA = semi tendinosus, BI = biceps, IP = ilio-psoas, TA = tibialis anterior).
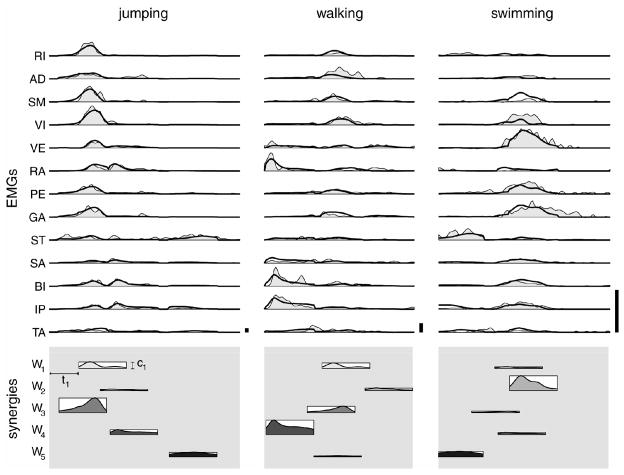
Examples of reconstruction of EMG patterns as combinations of time-varying muscle synergies. The three columns are examples of a jump, a walking cycle, and a swimming cycle. Upper section (EMGs): the thick line shows the reconstruction of muscle patterns and the shaded area represents the rectified, filtered and integrated EMGs. The lower section (synergies) shows the coefficients of the five synergies as the horizontal position (onset delay, ti) and the height (amplitude, ci) of a rectangle whose width corresponds to the synergy duration. The shaded profile in each rectangle illustrates the averaged time-course of the muscle activation waveforms of the corresponding synergy. Note the different amplitude scaling used in the three columns

Scaling of synergy recruitment in different frog behaviors. Each panel represents the recrutment of the five synergies of fig. 1 to generate either a jump (a, b, and c), or a walking cycle (d to g), or a swimming cycle (h and i).

Muscle synergies underlying intact and deafferented locomotor behaviors. A, Synchronous muscle synergies extracted from the pooled intact and deafferented jumping data of one frog. Four of the five synergies (Sh1-Sh4) were found to be shared between the intact and deafferented data sets, and one (Desp), specific to the deafferented data set. The fact that most of the synergies were extracted as shared synergies suggest that, many locomotor synergies are centrally organized. Modified from Cheung et al. (2005).
B, C, Reconstructing intact and deafferented jumping EMGs with synergies and their corresponding activation coefficients. The original EMG data (rectified, filtered, and integrated) are shown in black lines, and the time-varying coefficients activating the synchronous synergies are shown below the EMGs. The reconstruction of the motor pattern is superimposed onto the original EMGs. The colors composing the reconstruction match the colors of the coefficients such that the colors reflect the respective contribution of each synergy to the reconstruction at each time point. Modified from Cheung et al. (2005).
References
-
- Arbib MA. Perceptual structures and distributed motor control. In: Brooks VB, editor. Handbook of physiology, Section 2: the nervous system, Vol. II, Motor Control, Part 1. American Physiological Society; 1981. pp. 1449–1480.
-
- Bizzi E, Mussa-Ivaldi FA, Giszter SF. Computations underlying the execution of movement: a biological perspective. Science. 1991;253:287–291. - PubMed
-
- Buchanan TS, Almdale DPJ, Lewis JL, Rymer WZ. Characteristics of synergic relations during isometric contractions of human elbow muscles. J Neurophysiol. 1986;56:1225–1241. - PubMed
-
- Bullock D, Grosssberg S. Neural dynamics of planned arm movements: emergent invariants and speed-accuracy properties during trajectory formation. Psychol Rev. 1988;95:46–90. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
Medical
