

Place memory in crickets
- PMID: 18230590
- PMCID: PMC2599942
- DOI: 10.1098/rspb.2007.1647
Place memory in crickets
Abstract
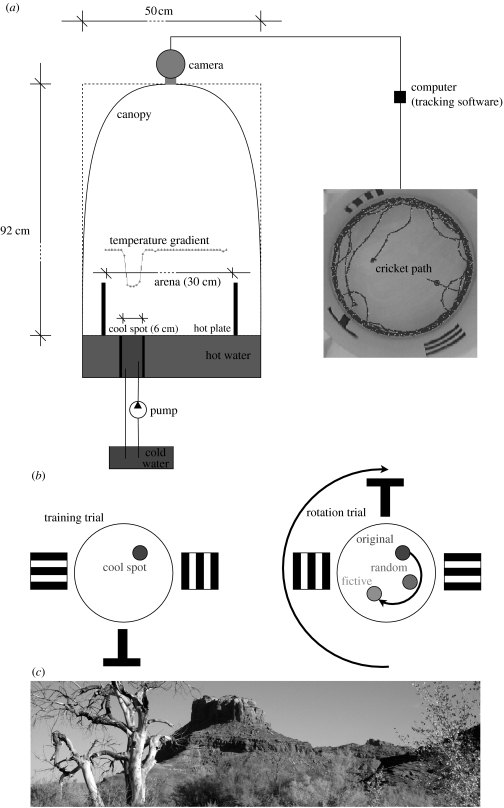
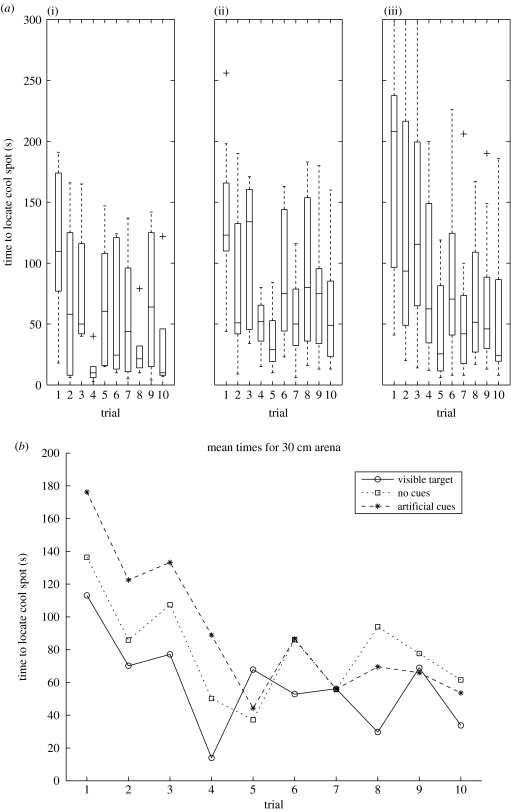
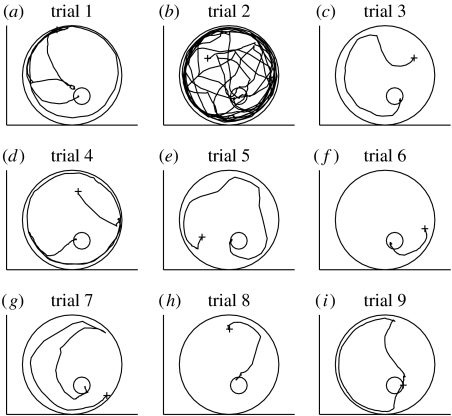
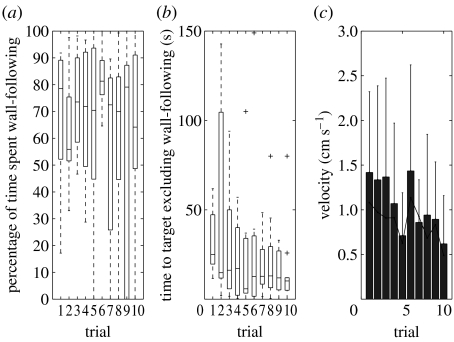
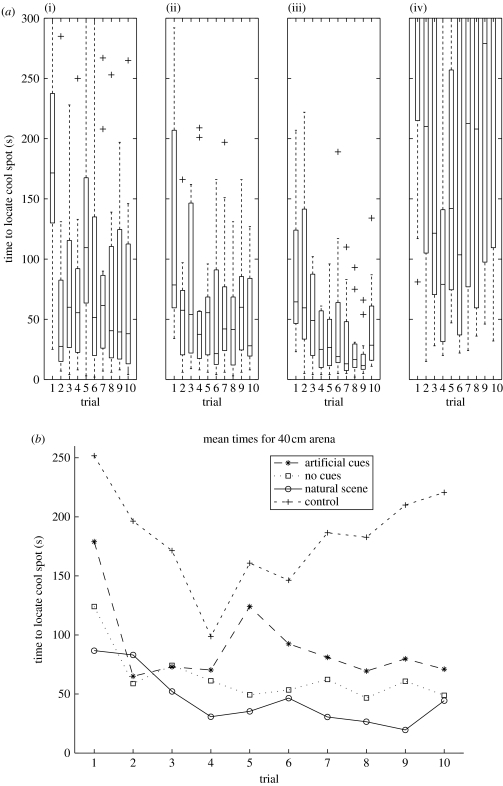
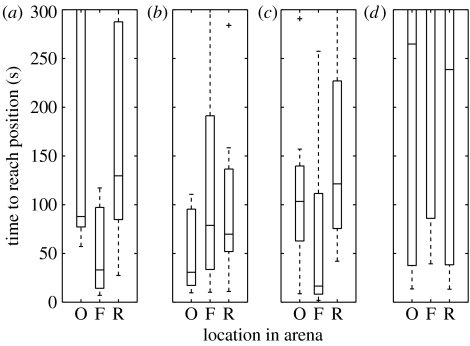
Certain insect species are known to relocate nest or food sites using landmarks, but the generality of this capability among insects, and whether insect place memory can be used in novel task settings, is not known. We tested the ability of crickets to use surrounding visual cues to relocate an invisible target in an analogue of the Morris water maze, a standard paradigm for spatial memory tests on rodents. Adult female Gryllus bimaculatus were released into an arena with a floor heated to an aversive temperature, with one hidden cool spot. Over 10 trials, the time taken to find the cool spot decreased significantly. The best performance was obtained when a natural scene was provided on the arena walls. Animals can relocate the position from novel starting points. When the scene is rotated, they preferentially approach the fictive target position corresponding to the rotation. We note that this navigational capability does not necessarily imply the animal has an internal spatial representation.
Figures
References
-
- Beugnon G. Learned orientation in landward swimming in the cricket Pteronemobius lineolatus. Behav. Process. 1986;12:215–226. doi:10.1016/0376-6357(86)90037-9 - DOI - PubMed
-
- Beugnon G, Campan R. Homing in the field cricket, Gryllus campestris. J. Insect Behav. 1989;2:187–198. doi:10.1007/BF01053291 - DOI
-
- Brunner D, Labhart T. Behavioural evidence for polarization vision in crickets. Physiol. Entomol. 1987;12:1–10.
-
- Cartwright B, Collett T. Landmark learning in bees: experiments and models. J. Comp. Physiol. A. 1983;151:521–543. doi:10.1007/BF00605469 - DOI
-
- Franz M, Mallot H. Biomimetic robot navigation. Robot. Auton. Syst. 2000;30:133–153. doi:10.1016/S0921-8890(99)00069-X - DOI
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Medical