

Decoding individuated finger movements using volume-constrained neuronal ensembles in the M1 hand area
- PMID: 18303801
- PMCID: PMC2713669
- DOI: 10.1109/TNSRE.2007.916269
Decoding individuated finger movements using volume-constrained neuronal ensembles in the M1 hand area
Abstract
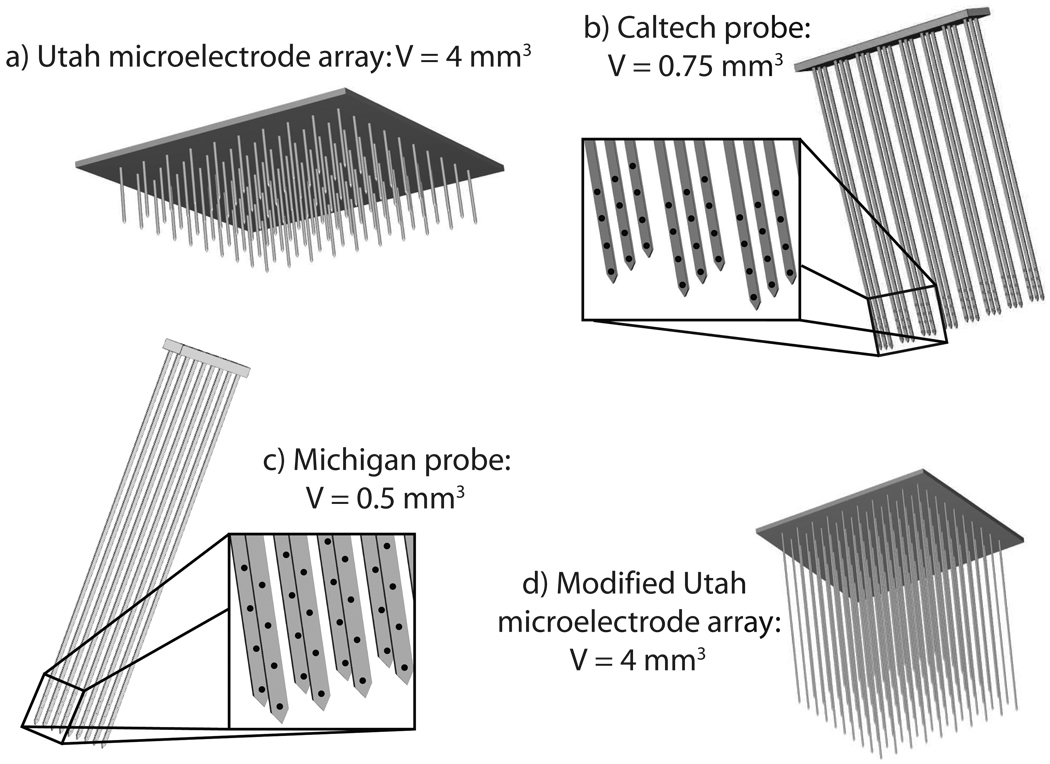
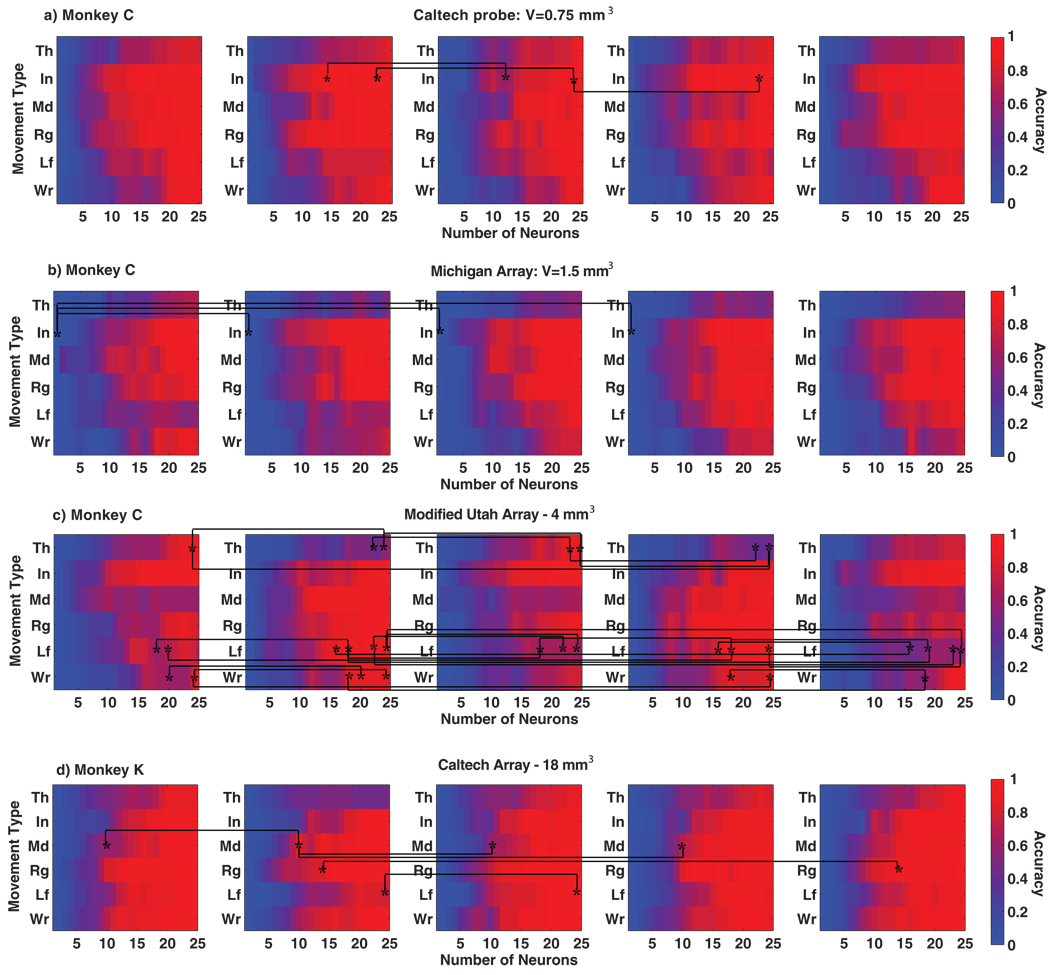
Individuated finger and wrist movements can be decoded using random subpopulations of neurons that are widely distributed in the primary motor (M1) hand area. This work investigates 1) whether it is possible to decode dexterous finger movements using spatially-constrained volumes of neurons as typically recorded from a microelectrode array; and 2) whether decoding accuracy differs due to the configuration or location of the array within the M1 hand area. Single-unit activities were sequentially recorded from task-related neurons in two rhesus monkeys as they performed individuated movements of the fingers and the wrist. Simultaneous neuronal ensembles were simulated by constraining these activities to the recording field dimensions of conventional microelectrode array architectures. Artificial neural network (ANN) based filters were able to decode individuated finger movements with greater than 90% accuracy for the majority of movement types, using as few as 20 neurons from these ensemble activities. Furthermore, for the large majority of cases there were no significant differences (p < 0.01) in decoding accuracy as a function of the location of the recording volume. The results suggest that a brain-machine interface (BMI) for dexterous control of individuated fingers and the wrist can be implemented using microelectrode arrays placed broadly in the M1 hand area.
Figures


References
-
- Serruya MD, Hatsopoulos N, Paninski L, Fellows MR, Donoghue JP. Instant neural control of a movement signal. Nature. 2002;vol. 416(no 6877):141–142. - PubMed
-
- Chapin JK, Moxon KA, Markowitz RS, Nicolelis MA. Real-time control of a robot arm using simultaneously recorded neurons in the motor cortex. Nature Neuroscience. 1999;vol. 2:664–670. - PubMed
-
- Hochberg LR, Serruya MD, Friehs GM, Mukand JA, Saleh M, Caplan AH, Branner A, Chen D, Penn RD, Donoghue JP. Neuronal ensemble control of prosthetic devices by a human with tetraplegia. Nature. 2006;vol. 442:164–171. - PubMed
-
- Schieber MH. Individuated finger movements of rhesus monkeys. Journal of Neurophysiology. 1991;vol. 65(no 6):1381–1391. - PubMed
