

Human-machine interfaces based on EMG and EEG applied to robotic systems
- PMID: 18366775
- PMCID: PMC2292737
- DOI: 10.1186/1743-0003-5-10
Human-machine interfaces based on EMG and EEG applied to robotic systems
Abstract
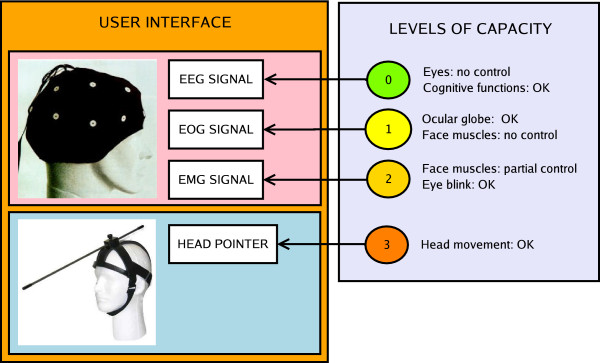
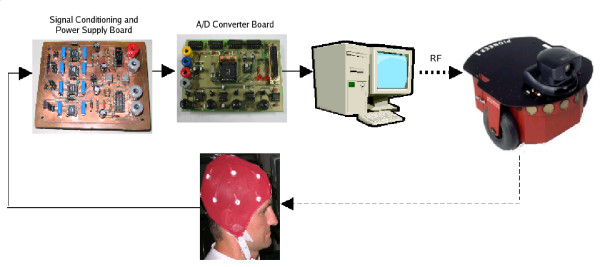
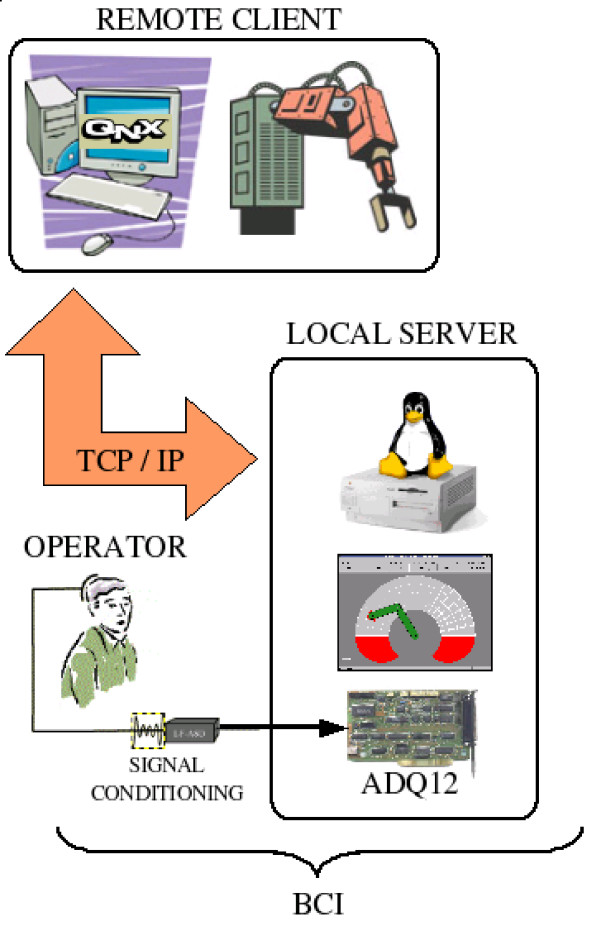
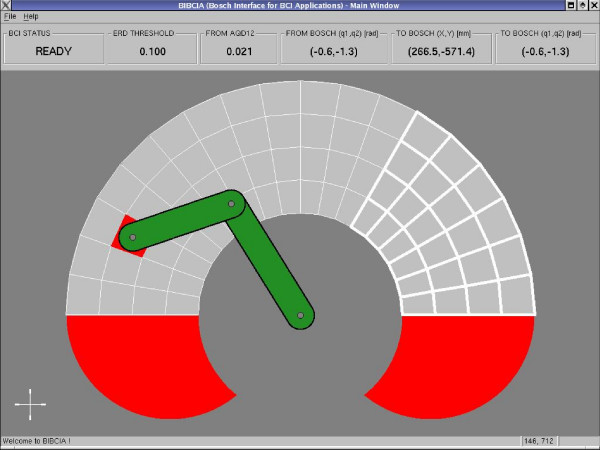
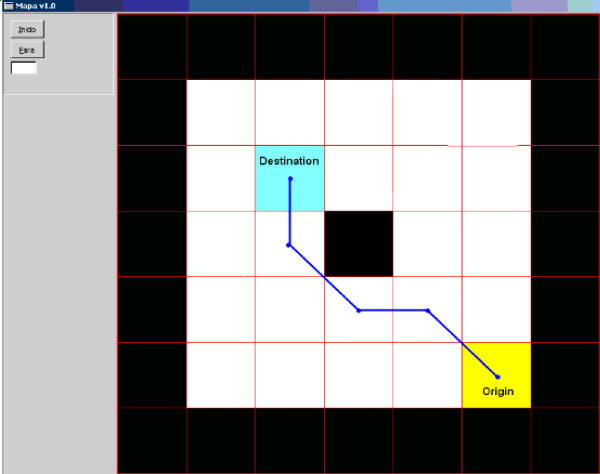
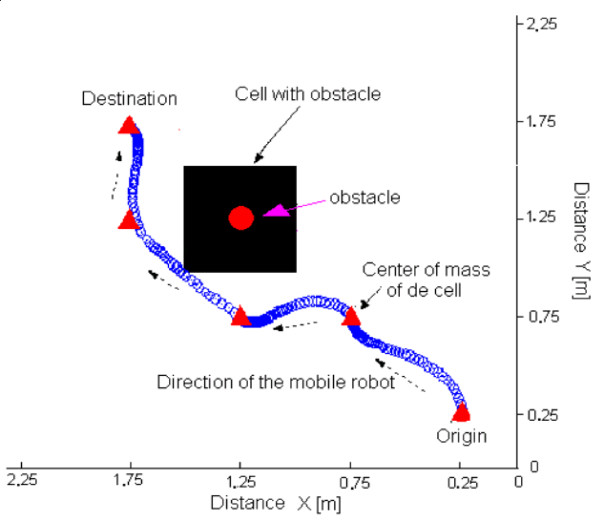
Background: Two different Human-Machine Interfaces (HMIs) were developed, both based on electro-biological signals. One is based on the EMG signal and the other is based on the EEG signal. Two major features of such interfaces are their relatively simple data acquisition and processing systems, which need just a few hardware and software resources, so that they are, computationally and financially speaking, low cost solutions. Both interfaces were applied to robotic systems, and their performances are analyzed here. The EMG-based HMI was tested in a mobile robot, while the EEG-based HMI was tested in a mobile robot and a robotic manipulator as well.
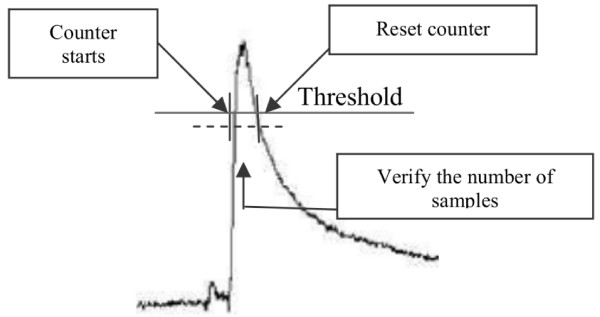
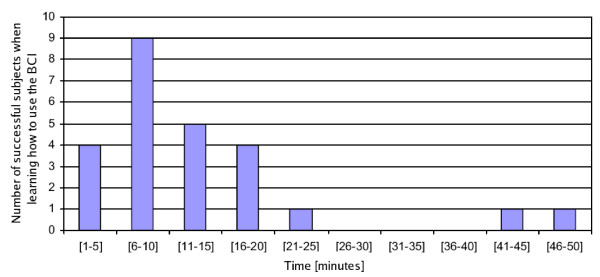
Results: Experiments using the EMG-based HMI were carried out by eight individuals, who were asked to accomplish ten eye blinks with each eye, in order to test the eye blink detection algorithm. An average rightness rate of about 95% reached by individuals with the ability to blink both eyes allowed to conclude that the system could be used to command devices. Experiments with EEG consisted of inviting 25 people (some of them had suffered cases of meningitis and epilepsy) to test the system. All of them managed to deal with the HMI in only one training session. Most of them learnt how to use such HMI in less than 15 minutes. The minimum and maximum training times observed were 3 and 50 minutes, respectively.
Conclusion: Such works are the initial parts of a system to help people with neuromotor diseases, including those with severe dysfunctions. The next steps are to convert a commercial wheelchair in an autonomous mobile vehicle; to implement the HMI onboard the autonomous wheelchair thus obtained to assist people with motor diseases, and to explore the potentiality of EEG signals, making the EEG-based HMI more robust and faster, aiming at using it to help individuals with severe motor dysfunctions.
Figures


References
-
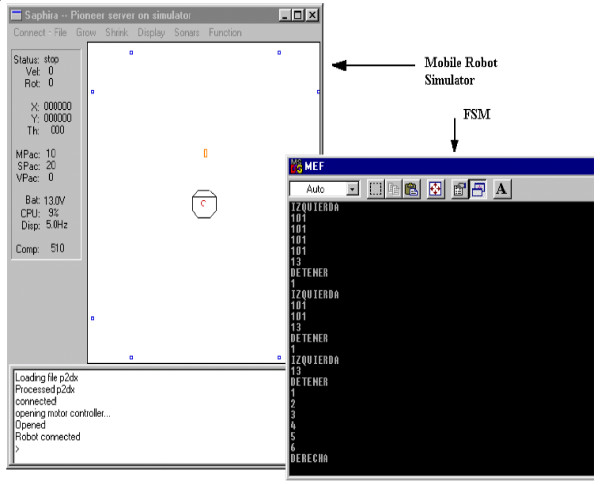
- Cheeín FA, Postigo J. A Fast Finite State Machine Design for a Brain Computer Interface. XI Reunión de Trabajo en Processamiento de la Información y Control, Argentina. 2005.
-
- Millán J, Renkens F, Mouriño J, Gerstner W. Non-Invasive Brain-Actuated Control of a Mobile Robot. Proceedings of the 18th International Joint Conference on Artificial Intelligence, Acapulco, Mexico. 2003.
-
- Kubler A, Kotchoubey B, Kaiser J, Wolpaw JR, Birbaumer N. Brain-computer communication: unlocking the locked in. Psychol Bull. 2001;127:358–375. - PubMed
-
- Mouriño J. PhD thesis. Universitat Politècnica de Catalunya, Barcelona, Spain; 2003. EEG-based Analysis for the Design of Adaptive Brain Interfaces.
-
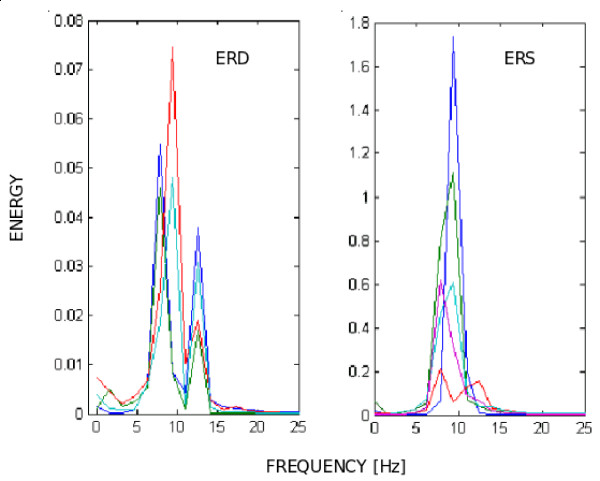
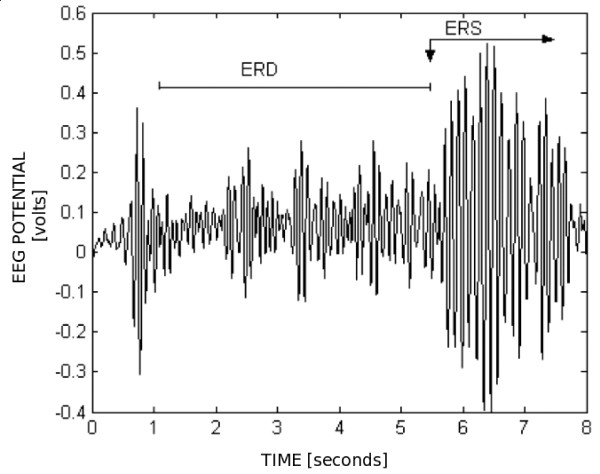
- Pfurtscheller G, da Silva FHL. Event-related EEG/MEG synchronization and desynchronization: basic principles. Clinical Neurophysiology. 1999;110:1842–1857. - PubMed
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
