

The effect of dynamic, semi-rigid implants on the range of motion of lumbar motion segments after decompression
- PMID: 18493802
- PMCID: PMC2518758
- DOI: 10.1007/s00586-008-0667-0
The effect of dynamic, semi-rigid implants on the range of motion of lumbar motion segments after decompression
Abstract
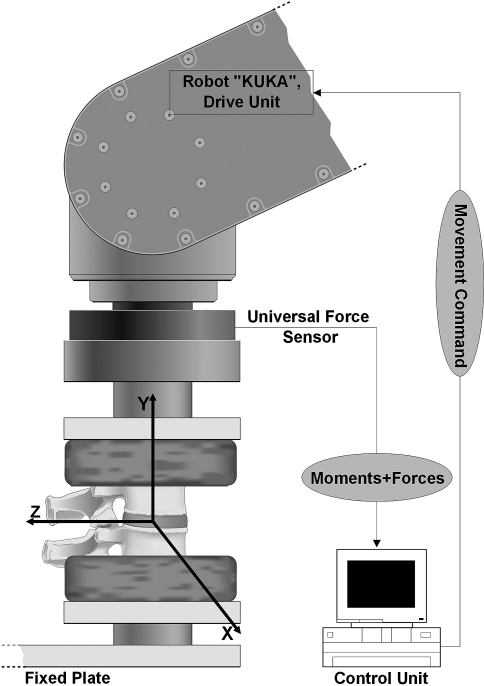
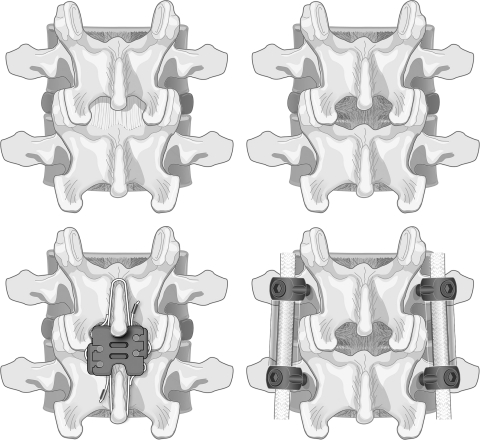
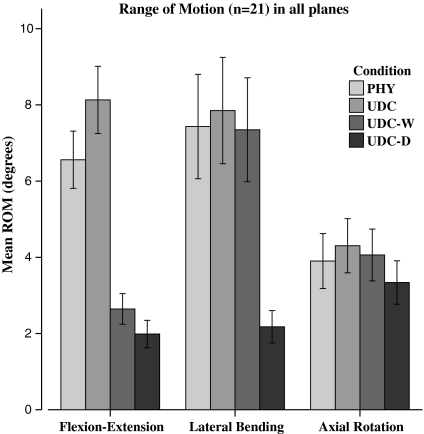
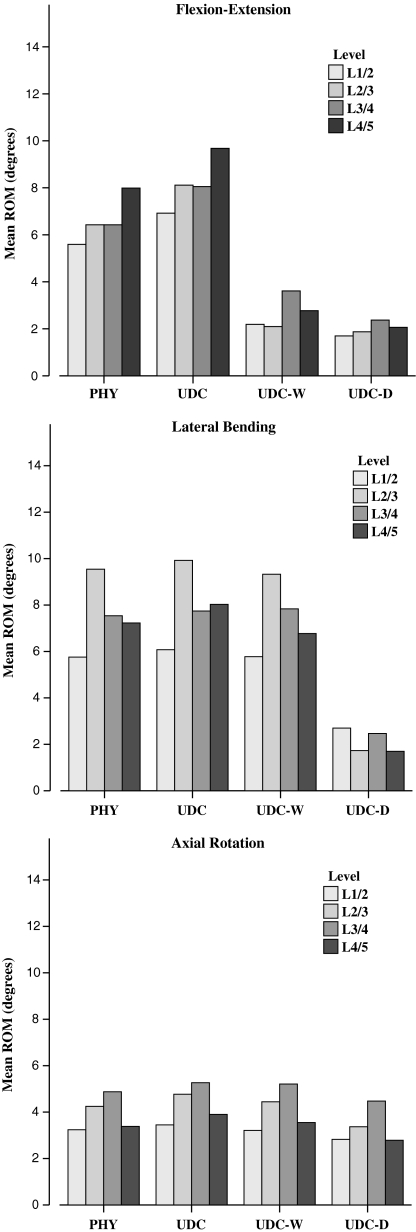
Undercutting decompression is a common surgical procedure for the therapy of lumbar spinal canal stenosis. Segmental instability, due to segmental degeneration or iatrogenic decompression is a typical problem that is clinically addressed by fusion, or more recently by semi-rigid stabilization devices. The objective of this experimental biomechanical study was to investigate the influence of spinal decompression alone, as well as in conjunction with two semi-rigid stabilizing implants (Wallis, Dynesys) on the range of motion (ROM) of lumbar spine segments. A total of 21 fresh-frozen human lumbar spine motion segments were obtained. Range of motion and neutral zone (NZ) were measured in flexion-extension (FE), lateral bending (LAT) and axial rotation (ROT) for each motion segment under four conditions: (1) with all stabilizing structures intact (PHY), (2) after bilateral undercutting decompression (UDC), (3) after additional implantation of Wallis (UDC-W) and (4) after removal of Wallis and subsequent implantation of Dynesys (UDC-D). Measurements were performed using a sensor-guided industrial robot in a pure-moment-loading mode. Range of motion was defined as the angle covered between loadings of -5 and +5 Nm during the last of three applied motion cycles. Untreated physiologic segments showed the following mean ROM: FE 6.6 degrees , LAT 7.4 degrees , ROT 3.9 degrees . After decompression, a significant increase of ROM was observed: 26% FE, 6% LAT, 12% ROT. After additional implantation of a semi-rigid device, a decrease in ROM compared to the situation after decompression alone was observed with a reduction of 66 and 75% in FE, 6 and 70% in LAT, and 5 and 22% in ROT being observed for the Wallis and Dynesys, respectively. When the flexion and extension contribution to ROM was separated, the Wallis implant restricted extension by 69% and flexion by 62%, the Dynesys by 73 and 75%, respectively. Compared to the intact status, instrumentation following decompression led to a ROM reduction of 58 and 68% in FE, 1 and 68% in LAT, -6 and 13% in ROT, 61 and 65% in extension and 54 and 70% in flexion for Wallis and Dynesys. The effect of the implants on NZ corresponded to that on ROM. In conclusion, implantation of the Wallis and Dynesys devices following decompression leads to a restriction of ROM in all motion planes investigated. Flexion-extension is most affected by both implants. The Dynesys implant leads to an additional strong restriction in lateral bending. Rotation is only mildly affected by both implants. Wallis and Dynesys restrict not only isolated extension, but also flexion. These biomechanical results support the hypothesis that postoperatively, the semi-rigid implants provide a primary stabilizing function directly. Whether they can improve the clinical outcome must still be verified in prospective clinical investigations.
Figures
Similar articles
-
Effects of cord pretension and stiffness of the Dynesys system spacer on the biomechanics of spinal decompression- a finite element study.BMC Musculoskelet Disord. 2013 Jun 19;14:191. doi: 10.1186/1471-2474-14-191. BMC Musculoskelet Disord. 2013. PMID: 23777265 Free PMC article.
-
Non-fusion instrumentation of the lumbar spine with a hinged pedicle screw rod system: an in vitro experiment.Eur Spine J. 2009 Oct;18(10):1478-85. doi: 10.1007/s00586-009-1052-3. Epub 2009 Jun 6. Eur Spine J. 2009. PMID: 19504129 Free PMC article.
-
Biomechanical characterization of the three-dimensional kinematic behaviour of the Dynesys dynamic stabilization system: an in vitro study.Eur Spine J. 2006 Jun;15(6):913-22. doi: 10.1007/s00586-005-0948-9. Epub 2005 Oct 11. Eur Spine J. 2006. PMID: 16217663 Free PMC article.
-
Biomechanical comparison of an interspinous device and a rigid stabilization on lumbar adjacent segment range of motion.Acta Chir Orthop Traumatol Cech. 2011;78(5):404-9. Acta Chir Orthop Traumatol Cech. 2011. PMID: 22094153
-
Properties of an interspinous fixation device (ISD) in lumbar fusion constructs: a biomechanical study.Spine J. 2013 May;13(5):572-9. doi: 10.1016/j.spinee.2013.01.042. Epub 2013 Mar 13. Spine J. 2013. PMID: 23498926
Cited by
-
[Results of the Wallis interspinous spacer].Orthopade. 2010 Jun;39(6):580-4. doi: 10.1007/s00132-009-1590-8. Orthopade. 2010. PMID: 20449563 German.
-
Quantifying intervertebral disc mechanics: a new definition of the neutral zone.BMC Musculoskelet Disord. 2011 Feb 7;12:38. doi: 10.1186/1471-2474-12-38. BMC Musculoskelet Disord. 2011. PMID: 21299900 Free PMC article.
-
Biomechanics of posterior dynamic stabilization systems.Adv Orthop. 2013;2013:451956. doi: 10.1155/2013/451956. Epub 2013 Mar 31. Adv Orthop. 2013. PMID: 23606975 Free PMC article.
-
Effects of cord pretension and stiffness of the Dynesys system spacer on the biomechanics of spinal decompression- a finite element study.BMC Musculoskelet Disord. 2013 Jun 19;14:191. doi: 10.1186/1471-2474-14-191. BMC Musculoskelet Disord. 2013. PMID: 23777265 Free PMC article.
-
Biomechanical evaluation of posterior lumbar dynamic stabilization: an in vitro comparison between Universal Clamp and Wallis systems.Eur Spine J. 2011 Feb;20(2):289-96. doi: 10.1007/s00586-010-1641-1. Epub 2010 Dec 4. Eur Spine J. 2011. PMID: 21132335 Free PMC article.
References
-
- Aalto TJ, Malmivaara A, Kovacs F, Herno A, Alen M, Salmi L, Kroger H, Andrade J, Jimenez R, Tapaninaho A, Turunen V, Savolainen S, Airaksinen O. Preoperative predictors for postoperative clinical outcome in lumbar spinal stenosis: systematic review. Spine. 2006;31:E648–E663. doi: 10.1097/01.brs.0000231727.88477.da. - DOI - PubMed
-
- Benini A. [Lumbar spinal stenosis. An overview 50 years following initial description] Orthopade. 1993;22:257–266. - PubMed
MeSH terms
LinkOut - more resources
Full Text Sources
Research Materials
