

doi: 10.1177/1045389X06059076.
Smart Rehabilitation Devices: Part II - Adaptive Motion Control
Affiliations
- PMID: 18548131
- PMCID: PMC2424262
- DOI: 10.1177/1045389X06059076
Item in Clipboard
Smart Rehabilitation Devices: Part II - Adaptive Motion Control
J Intell Mater Syst Struct.
2006.
Abstract
This article presents a study of adaptive motion control of smart versatile rehabilitation devices using MR fluids. The device provides both isometric and isokinetic strength training and is reconfigurable for several human joints. Adaptive controls are developed to regulate resistance force based on the prescription of the therapist. Special consideration has been given to the human-machine interaction in the adaptive control that can modify the behavior of the device to account for strength gains or muscle fatigue of the human subject.
Figures

Configuration of the control system for the versatile rehabilitation device.

Simulation of the adaptive current control. Solid line: The reference. Dashed line: The actual current.

Simulation of the adaptive force control. Top: The torque tracking. Solid line: The desired force. Dashed line: The actual torque. Bottom: The coil voltage input.

Simulation of the adaptive joint motion regulation. Solid line: The prescribed motion profile or the true parameters. Dashed line: The actual motion or the estimated parameters.

Experimental results of the adaptive current control. Solid line: The reference. Dashed line: The actual current output. This figure compares well with Figure 2.
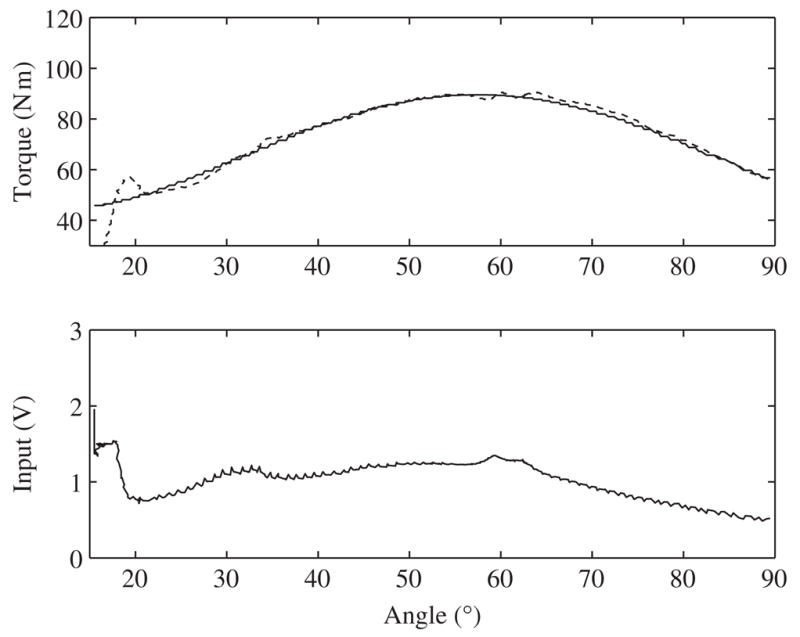
Experimental results of the adaptive force control. Top: The force tracking. Solid line: The desired force. Dashed line: The actual force. Bottom: The coil voltage input.

Experimental results of the knee joint motion regulation and parameter estimations. In the top figure, Solid line: The prescribed joint speed. Dashed line: The actual speed.
References
-
- Andrews AW, Bohannon RW. Short-term Recovery of Limb Muscle Strength after Acute Stroke. Archives of Physical Medicine and Rehabilitation. 2003;84(1):125–130. - PubMed
-
- Creamer P, Hochberg MC. Osteoarthritis. Lancet. 1997;350(9076):503–509. - PubMed
-
- Damiano DL, Martellotta TL, Sullivan DJ, Granata KP, Abel MF. Muscle Force Production and Functional Performance in Spastic Cerebral Palsy: Relationship of Cocontraction. Archives of Physical Medicine and Rehabilitation. 2000;81(7):895–900. - PubMed
-
- Desplantez A, Goubel F. In vivo Force-velocity Relation of Human Muscle: A Modelling from Sinusoidal Oscillation Behaviour. Journal of Biomechanics. 2002;35(12):1565–1573. - PubMed
-
- Desplantez A, Cornu C, Goubel F. Viscous Properties of Human Muscle during Contraction. Journal of Biomechanics. 1999;32(1):555–562. - PubMed
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources