

Integrated information in discrete dynamical systems: motivation and theoretical framework
- PMID: 18551165
- PMCID: PMC2386970
- DOI: 10.1371/journal.pcbi.1000091
Integrated information in discrete dynamical systems: motivation and theoretical framework
Abstract
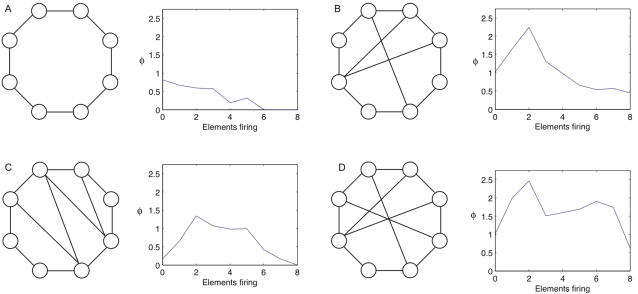
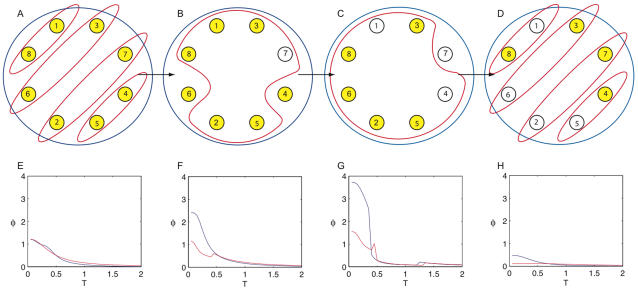
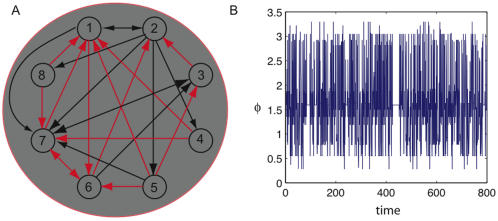
This paper introduces a time- and state-dependent measure of integrated information, phi, which captures the repertoire of causal states available to a system as a whole. Specifically, phi quantifies how much information is generated (uncertainty is reduced) when a system enters a particular state through causal interactions among its elements, above and beyond the information generated independently by its parts. Such mathematical characterization is motivated by the observation that integrated information captures two key phenomenological properties of consciousness: (i) there is a large repertoire of conscious experiences so that, when one particular experience occurs, it generates a large amount of information by ruling out all the others; and (ii) this information is integrated, in that each experience appears as a whole that cannot be decomposed into independent parts. This paper extends previous work on stationary systems and applies integrated information to discrete networks as a function of their dynamics and causal architecture. An analysis of basic examples indicates the following: (i) phi varies depending on the state entered by a network, being higher if active and inactive elements are balanced and lower if the network is inactive or hyperactive. (ii) phi varies for systems with identical or similar surface dynamics depending on the underlying causal architecture, being low for systems that merely copy or replay activity states. (iii) phi varies as a function of network architecture. High phi values can be obtained by architectures that conjoin functional specialization with functional integration. Strictly modular and homogeneous systems cannot generate high phi because the former lack integration, whereas the latter lack information. Feedforward and lattice architectures are capable of generating high phi but are inefficient. (iv) In Hopfield networks, phi is low for attractor states and neutral states, but increases if the networks are optimized to achieve tension between local and global interactions. These basic examples appear to match well against neurobiological evidence concerning the neural substrates of consciousness. More generally, phi appears to be a useful metric to characterize the capacity of any physical system to integrate information.
Conflict of interest statement
The authors have declared that no competing interests exist.
Figures
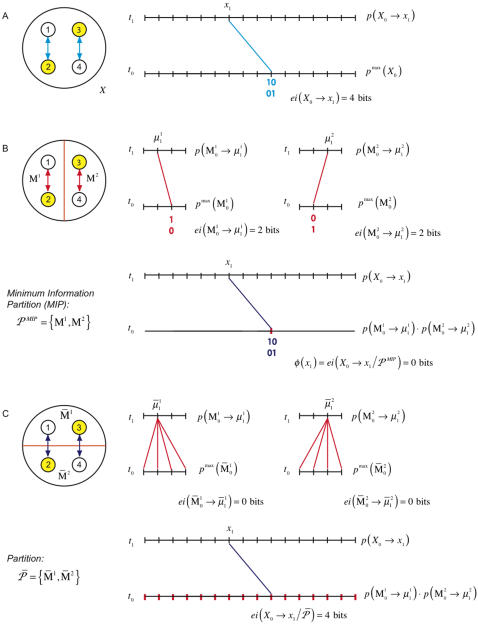
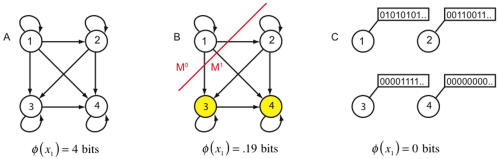
 is not isolated it cannot account for the effect of interactions with
is not isolated it cannot account for the effect of interactions with  internally; they are treated as extrinsic noise and result in
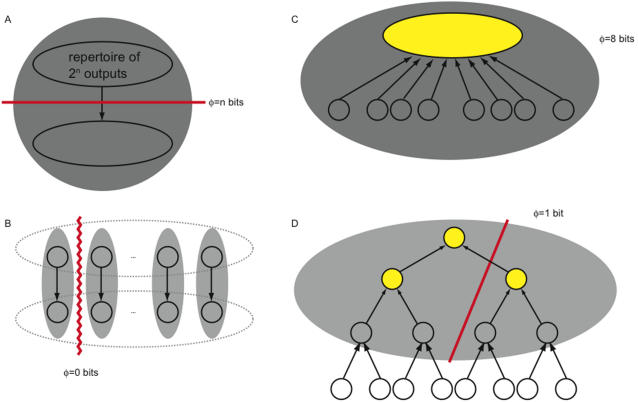
internally; they are treated as extrinsic noise and result in  specifying a maximum entropy a posteriori repertoire. Effective information generated across the partition is 4 bits.
specifying a maximum entropy a posteriori repertoire. Effective information generated across the partition is 4 bits.
References
-
- Tononi G. Information measures for conscious experience. Arch Ital Biol. 2001;139:367–371. - PubMed
-
- Posner JB, Saper CB, Schiff ND. Oxford University Press; 2007. Plum and Posner's Diagnosis of Stupor and Coma:
-
- Tononi G. Consciousness, information integration, and the brain. Prog Brain Res. 2005;150:109–126. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
