

Optimal compensation for temporal uncertainty in movement planning
- PMID: 18654619
- PMCID: PMC2442880
- DOI: 10.1371/journal.pcbi.1000130
Optimal compensation for temporal uncertainty in movement planning
Abstract
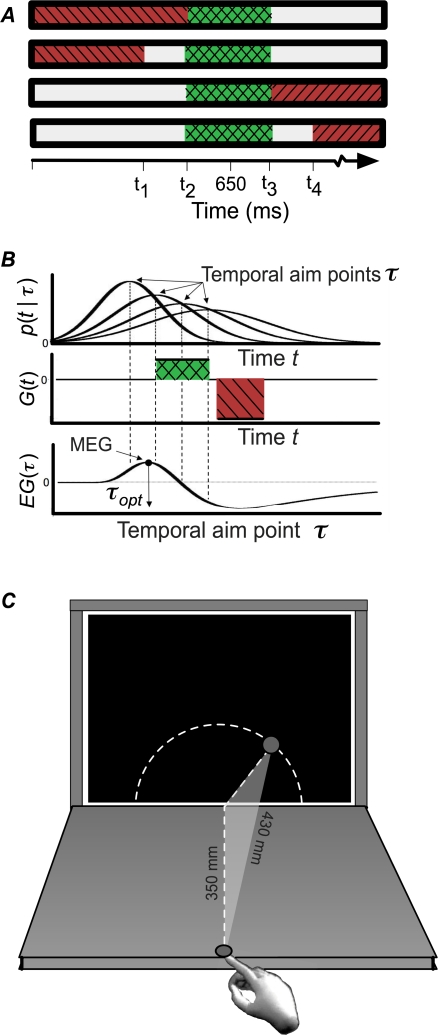
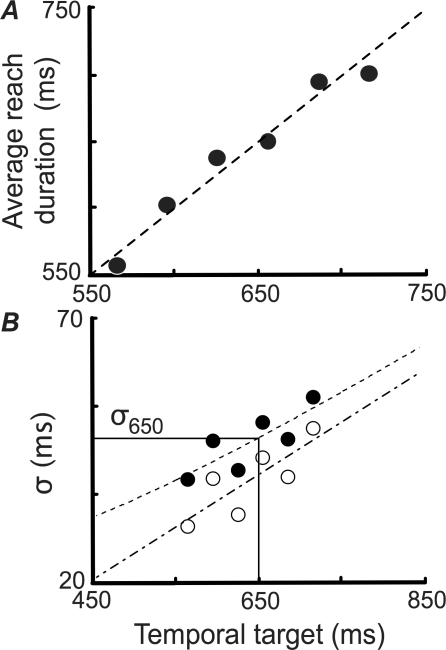
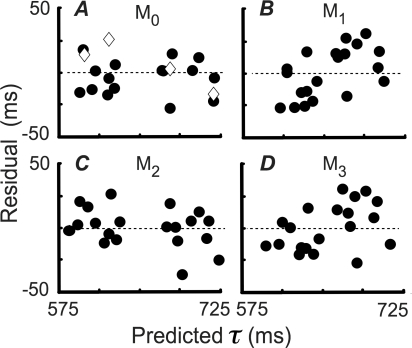
Motor control requires the generation of a precise temporal sequence of control signals sent to the skeletal musculature. We describe an experiment that, for good performance, requires human subjects to plan movements taking into account uncertainty in their movement duration and the increase in that uncertainty with increasing movement duration. We do this by rewarding movements performed within a specified time window, and penalizing slower movements in some conditions and faster movements in others. Our results indicate that subjects compensated for their natural duration-dependent temporal uncertainty as well as an overall increase in temporal uncertainty that was imposed experimentally. Their compensation for temporal uncertainty, both the natural duration-dependent and imposed overall components, was nearly optimal in the sense of maximizing expected gain in the task. The motor system is able to model its temporal uncertainty and compensate for that uncertainty so as to optimize the consequences of movement.
Conflict of interest statement
The authors have declared that no competing interests exist.
Figures


References
-
- Billaut F, Basset FA, Falgairette G. Muscle coordination changes during intermittent cycling sprints. Neurosci Lett. 2005;380:265–269. - PubMed
-
- Churchyard AJ, Morris ME, Georgiou N, Chiu E, Cooper R, et al. Gait dysfunction in Huntington's disease: Parkinsonism and a disorder of timing. Adv Neurol. 2001;87:375–385. - PubMed
-
- Corcos DM, Jiang HY, Wilding J, Gottlieb GL. Fatigue induced changes in phasic muscle activation patterns for fast elbow flexion movements. Exp Brain Res. 2002;142:1–12. - PubMed
-
- Gribble PL, Ostry DJ. Compensation for Interaction Torques During Single- and Multijoint Limb Movement. J Neurophysiol. 1999;82:2310–2326. - PubMed
-
- Howard RM, Shea CH, Herbert WG. The effects of fatigue on the control of a coincident timing response. J Gen Psychol. 1982;106:263–271. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Medical
