

Human vergence eye movements to oblique disparity stimuli: evidence for an anisotropy favoring horizontal disparities
- PMID: 18675438
- PMCID: PMC2562683
- DOI: 10.1016/j.visres.2008.05.009
Human vergence eye movements to oblique disparity stimuli: evidence for an anisotropy favoring horizontal disparities
Abstract
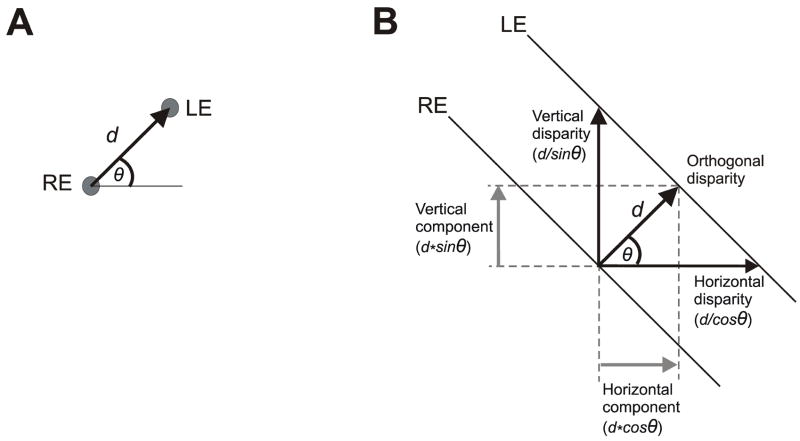
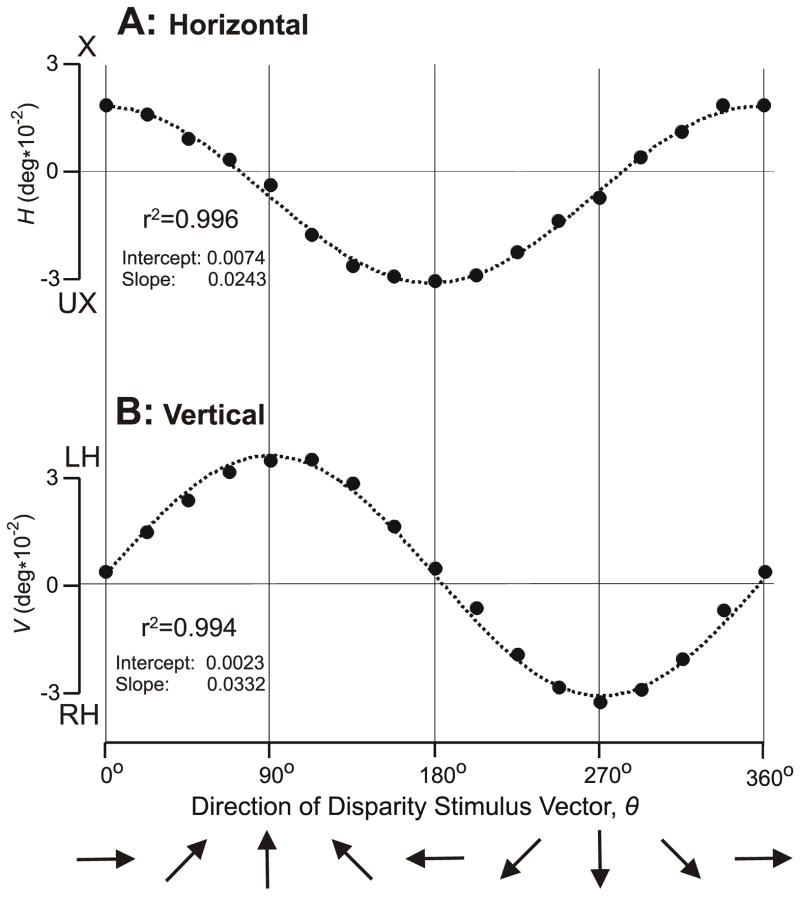
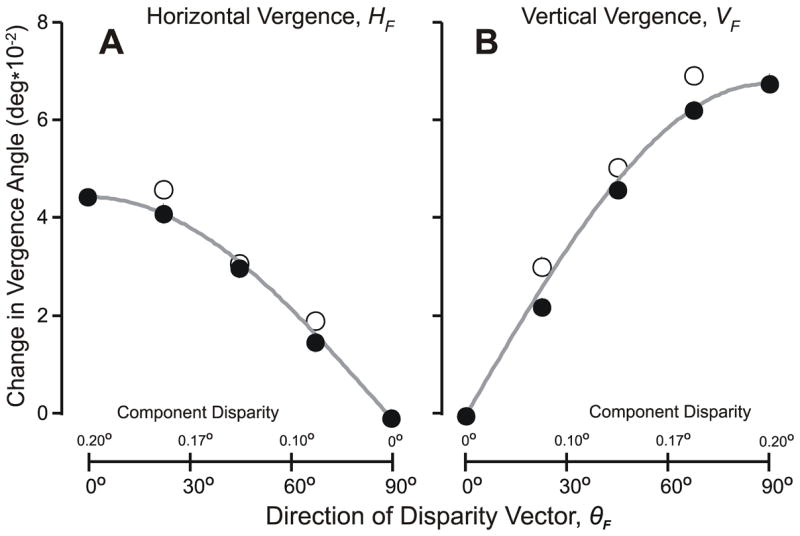
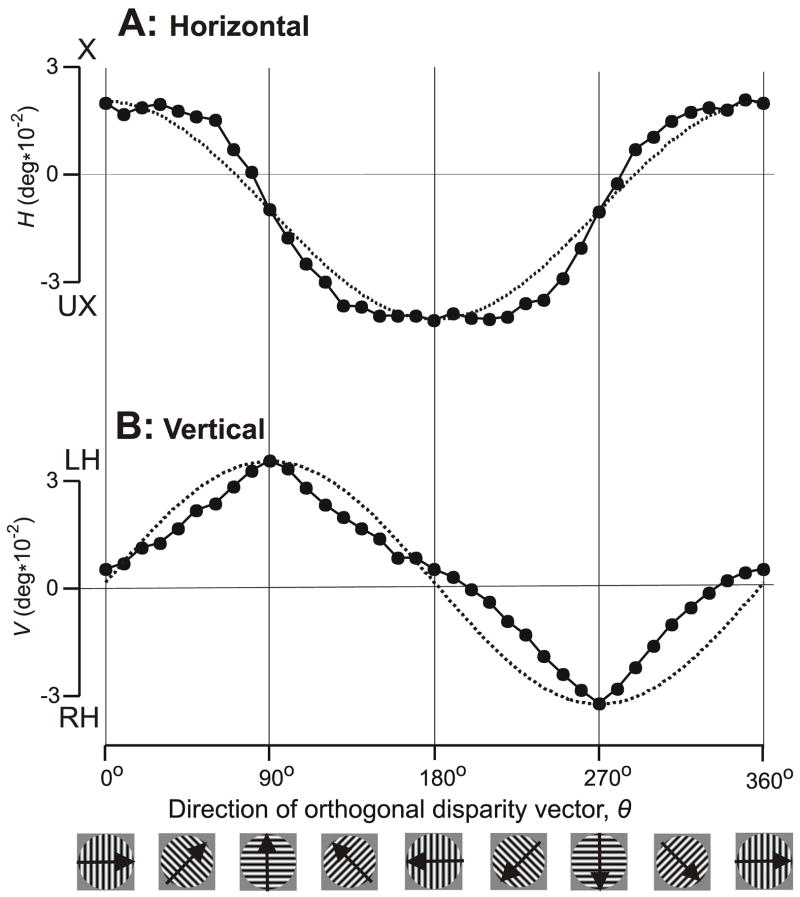
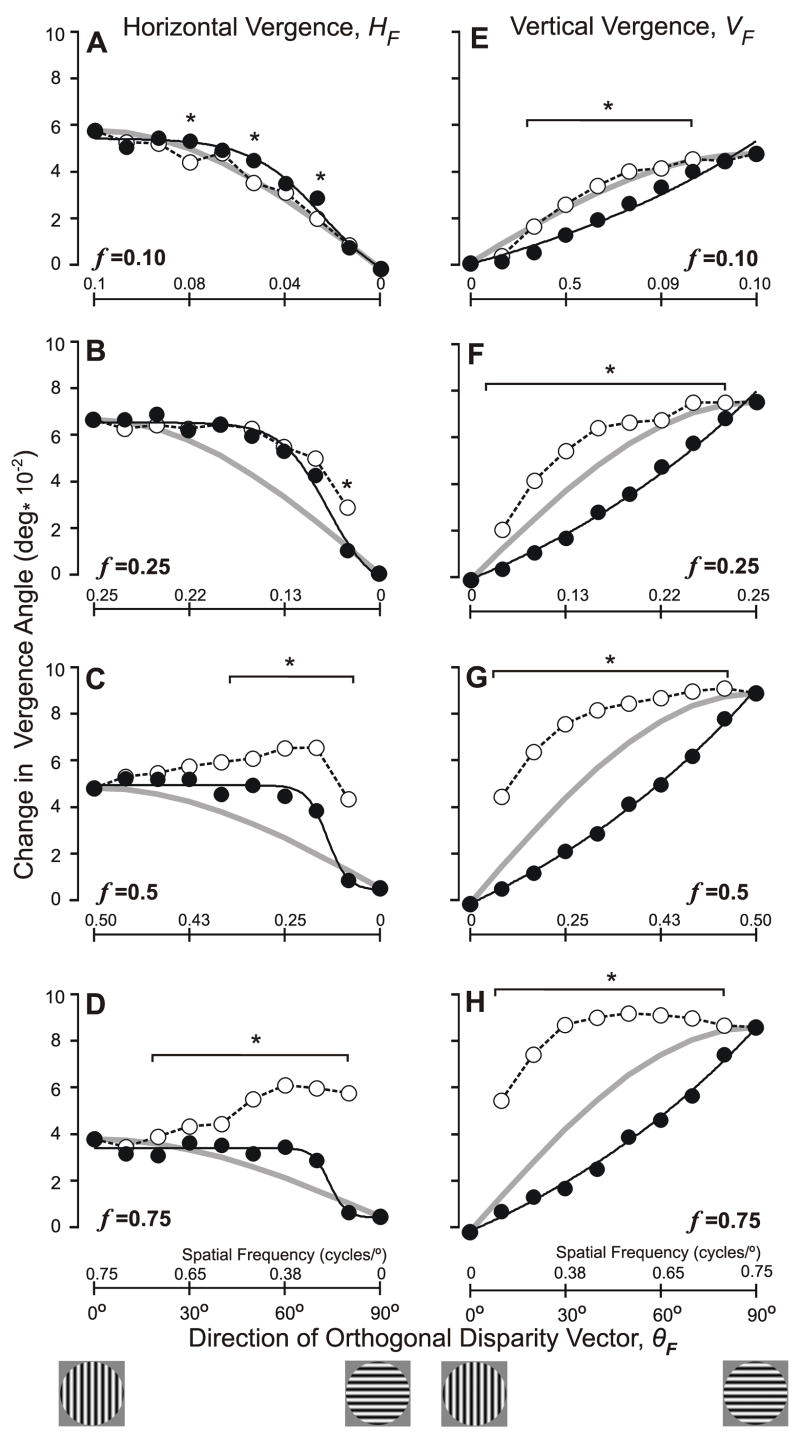
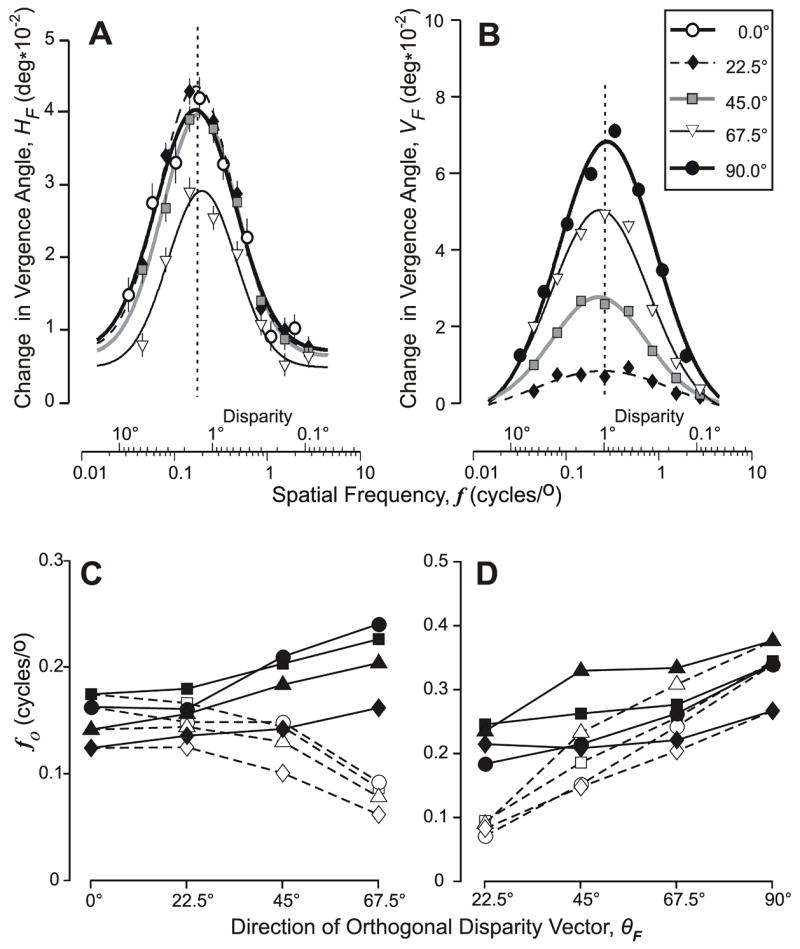
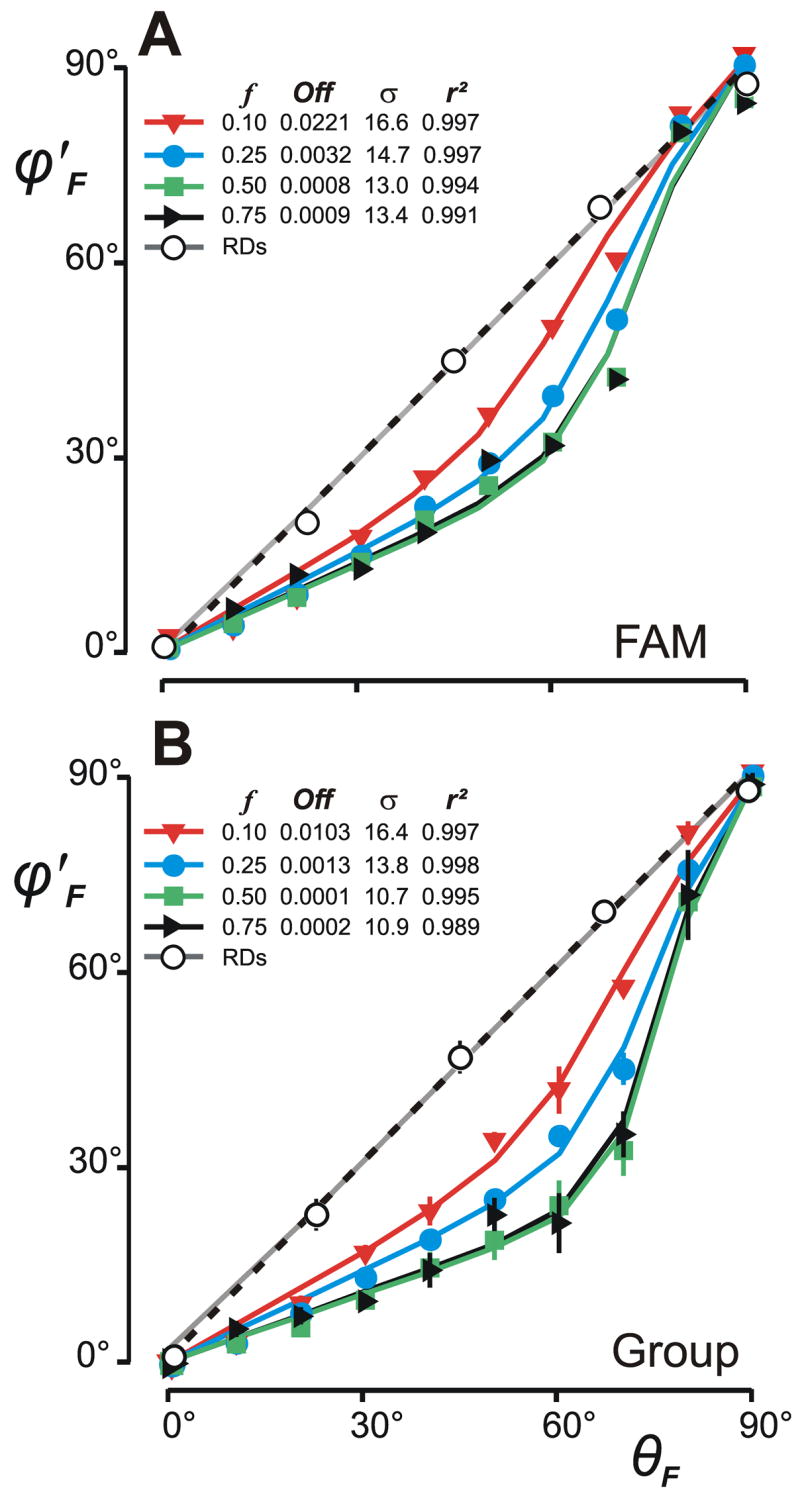
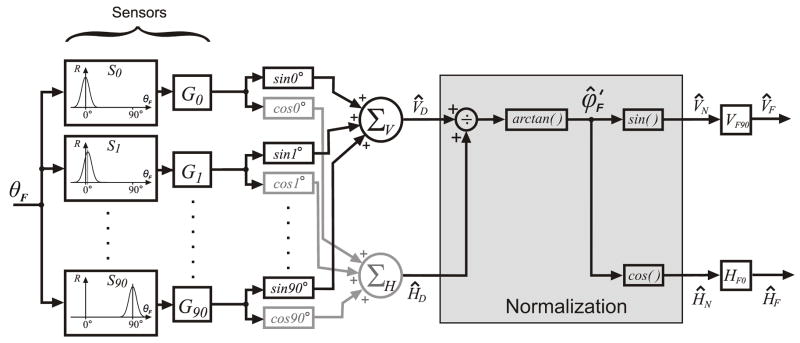
Binocular disparities applied to large-field patterns elicit vergence eye movements at ultra-short latencies. We used the electromagnetic search coil technique to record the horizontal and vertical positions of both eyes while subjects briefly viewed (150 ms) large patterns that were identical at the two eyes except for a difference in position (binocular disparity) that was varied in direction from trial to trial. For accurate alignment with the stimuli, the horizontal and vertical disparity vergence responses (HDVRs, VDVRs) should vary as the sine and cosine, respectively, of the direction of the disparity stimulus vector. In a first experiment, using random-dots patterns (RDs) with a binocular disparity of 0.2 degrees , this was indeed the case. In a second experiment, using 1-D sine-wave gratings with a binocular phase difference (disparity) of 1/4-wavelength, it was not the case: HDVRs were maximal when the grating was vertical and showed little decrement until the grating was oriented more than approximately 65 degrees away from vertical, whereas VDVRs were maximal when the grating was horizontal and began to decrement roughly linearly when the grating was oriented away from the horizontal. We attribute these complex directional dependencies with gratings to the aperture problem, and the HDVR data strongly resemble the stereothresholds for 1-D gratings, which are minimal when the gratings are vertical and remain constant for orientations up to approximately 80 degrees away from the vertical when expressed as spatial phase disparities [Morgan, M. J., & Castet, E. (1997). The aperture problem in stereopsis. Vision Research, 37, 2737-2744.]. To explain this constancy of stereothresholds, Morgan and Castet (1997) postulated detectors sensitive to the phase disparity of the gratings seen by the two eyes (rather than their linear separation along some fixed axis, such as the horizontal). However, because (1) our VDVR data with gratings did not show this constancy and (2) the available evidence strongly suggests that there are no major differences in the disparity detectors mediating the initial HDVR and VDVR, we sought an alternative explanation for our data. We show that the dependence of the initial HDVR and VDVR on grating orientation can be successfully modeled by a bias in the number and/or efficacy of the detectors that favors horizontal disparities.
Figures
References
-
- Anzai A, Ohzawa I, Freeman RD. Neural mechanisms for processing binocular information II. Complex cells. Journal of Neurophysiology. 1999;82:909–924. - PubMed
-
- Brainard DH. The Psychophysics Toolbox. Spatial Vision. 1997;10:433–436. - PubMed
-
- Bridge H, Cumming BG, Parker AJ. Modeling V1 neuronal responses to orientation disparity. Visual Neuroscience. 2001;18:879–891. - PubMed
-
- Busettini C, FitzGibbon EJ, Miles FA. Short-latency disparity vergence in humans. Journal of Neurophysiology. 2001;85:1129–1152. - PubMed
-
- Busettini C, Miles FA, Krauzlis RJ. Short-latency disparity vergence responses and their dependence on a prior saccadic eye movement. Journal of Neurophysiology. 1996;75:1392–1410. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
