

Kriging and Semivariogram Deconvolution in the Presence of Irregular Geographical Units
- PMID: 18725997
- PMCID: PMC2518693
Kriging and Semivariogram Deconvolution in the Presence of Irregular Geographical Units
Abstract
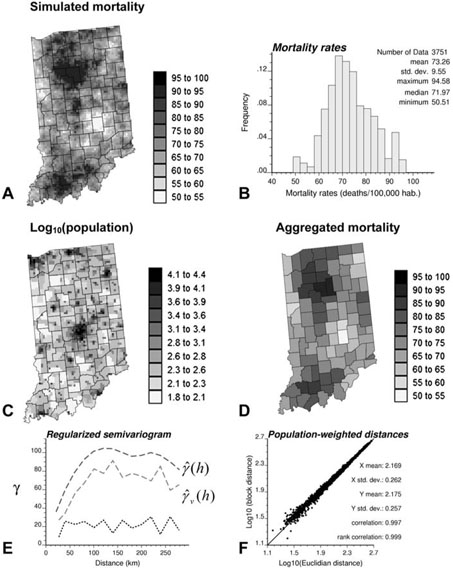
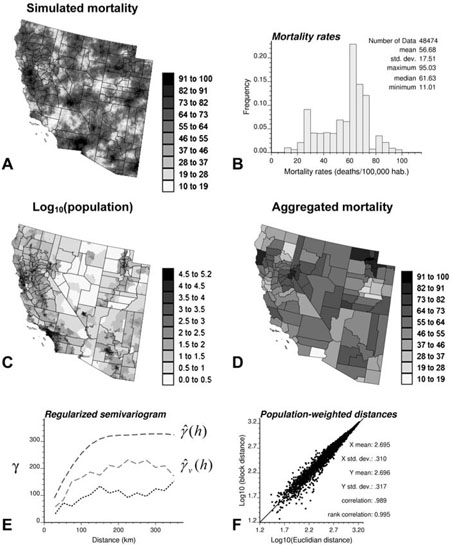
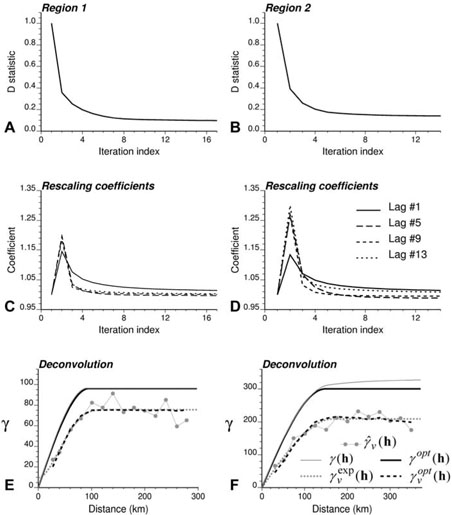
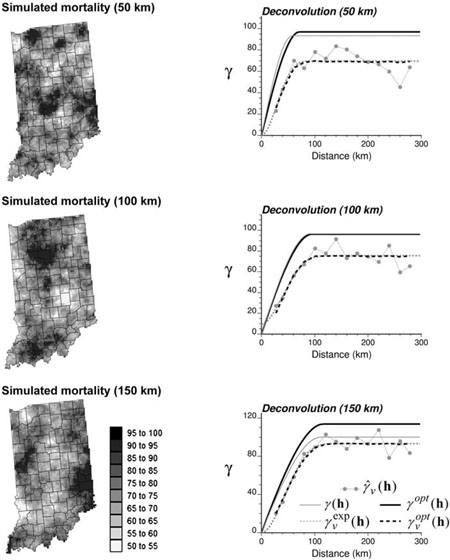
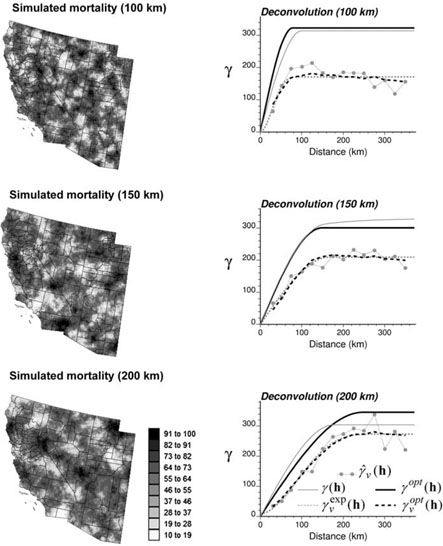
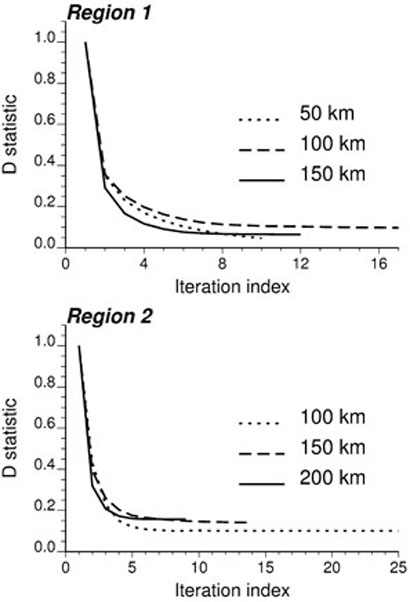
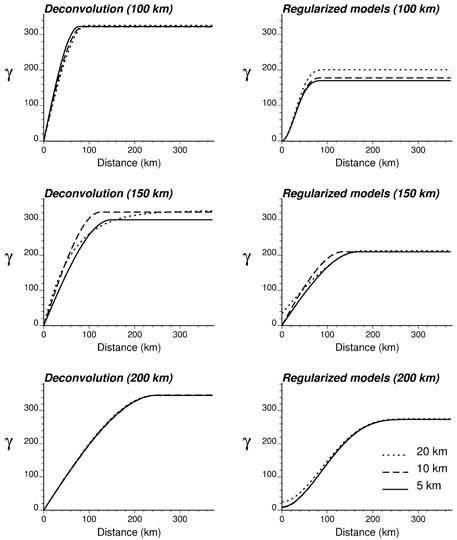
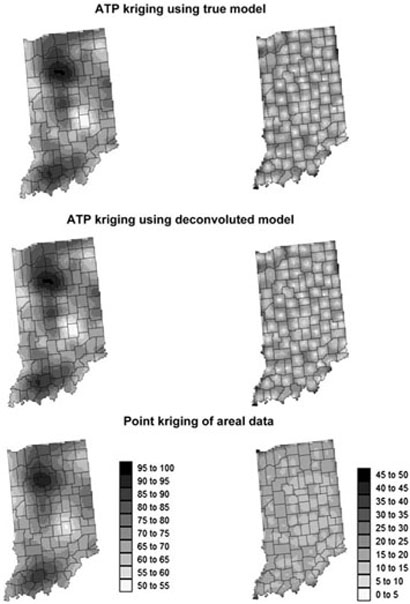
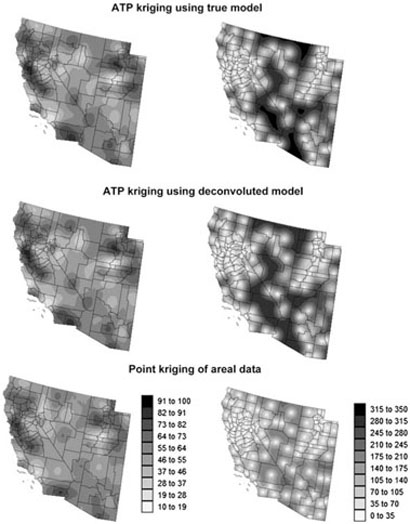
This paper presents a methodology to conduct geostatistical variography and interpolation on areal data measured over geographical units (or blocks) with different sizes and shapes, while accounting for heterogeneous weight or kernel functions within those units. The deconvolution method is iterative and seeks the pointsupport model that minimizes the difference between the theoretically regularized semivariogram model and the model fitted to areal data. This model is then used in area-to-point (ATP) kriging to map the spatial distribution of the attribute of interest within each geographical unit. The coherence constraint ensures that the weighted average of kriged estimates equals the areal datum.This approach is illustrated using health data (cancer rates aggregated at the county level) and population density surface as a kernel function. Simulations are conducted over two regions with contrasting county geographies: the state of Indiana and four states in the Western United States. In both regions, the deconvolution approach yields a point support semivariogram model that is reasonably close to the semivariogram of simulated point values. The use of this model in ATP kriging yields a more accurate prediction than a naïve point kriging of areal data that simply collapses each county into its geographic centroid. ATP kriging reduces the smoothing effect and is robust with respect to small differences in the point support semivariogram model. Important features of the point-support semivariogram, such as the nugget effect, can never be fully validated from areal data. The user may want to narrow down the set of solutions based on his knowledge of the phenomenon (e.g., set the nugget effect to zero). The approach presented avoids the visual bias associated with the interpretation of choropleth maps and should facilitate the analysis of relationships between variables measured over different spatial supports.
Figures

Similar articles
-
Geostatistical analysis of disease data: accounting for spatial support and population density in the isopleth mapping of cancer mortality risk using area-to-point Poisson kriging.Int J Health Geogr. 2006 Nov 30;5:52. doi: 10.1186/1476-072X-5-52. Int J Health Geogr. 2006. PMID: 17137504 Free PMC article.
-
A coherent geostatistical approach for combining choropleth map and field data in the spatial interpolation of soil properties.Eur J Soil Sci. 2011 Jun;62(3):371-380. doi: 10.1111/j.1365-2389.2011.01368.x. Eur J Soil Sci. 2011. PMID: 22308075 Free PMC article.
-
Combining Areal and Point Data in Geostatistical Interpolation: Applications to Soil Science and Medical Geography.Math Geosci. 2010 Jul 1;42(5):535-554. doi: 10.1007/s11004-010-9286-5. Math Geosci. 2010. PMID: 21132098 Free PMC article.
-
Folic acid supplementation and malaria susceptibility and severity among people taking antifolate antimalarial drugs in endemic areas.Cochrane Database Syst Rev. 2022 Feb 1;2(2022):CD014217. doi: 10.1002/14651858.CD014217. Cochrane Database Syst Rev. 2022. PMID: 36321557 Free PMC article.
-
Cumulative Ordinary Kriging interpolation model to forecast radioactive fallout, and its application to Chernobyl and Fukushima assessment: a new method and mini review.Environ Sci Pollut Res Int. 2022 Sep;29(43):64298-64311. doi: 10.1007/s11356-022-21921-4. Epub 2022 Jul 16. Environ Sci Pollut Res Int. 2022. PMID: 35841508 Review.
Cited by
-
A stabilized spatiotemporal kriging method for disease mapping and application to male oral cancer and female breast cancer in Taiwan.BMC Med Res Methodol. 2022 Oct 13;22(1):270. doi: 10.1186/s12874-022-01749-9. BMC Med Res Methodol. 2022. PMID: 36229788 Free PMC article.
-
Model-driven development of covariances for spatiotemporal environmental health assessment.Environ Monit Assess. 2013 Jan;185(1):815-31. doi: 10.1007/s10661-012-2593-1. Epub 2012 Mar 14. Environ Monit Assess. 2013. PMID: 22411031
-
Medical Geography: a Promising Field of Application for Geostatistics.Math Geol. 2009;41:243-264. doi: 10.1007/s11004-008-9211-3. Math Geol. 2009. PMID: 19412347 Free PMC article.
-
Geostatistical Analysis of County-Level Lung Cancer Mortality Rates in the Southeastern United States.Geogr Anal. 2010 Jan 1;42(1):32-52. doi: 10.1111/j.1538-4632.2009.00781.x. Geogr Anal. 2010. PMID: 20445829 Free PMC article.
-
Spatial association between outdoor air pollution and lung cancer incidence in China.BMC Public Health. 2019 Oct 26;19(1):1377. doi: 10.1186/s12889-019-7740-y. BMC Public Health. 2019. PMID: 31655581 Free PMC article.
References
-
- Armstrong M. Basic linear geostatistics. Springer, Berlin: 1998. p. 172.
-
- Barabás N, Goovaerts P, Adriaens P. Geostatistical assessment and validation of uncertainty for three-dimensional dioxin data from sediments in an estuarine river. Environ Sci Technol. 2001;35(16):3294–3301. - PubMed
-
- Chiles JP, Delfiner P. Geostatistics: modeling spatial uncertainty. Wiley, New York: 1999. p. 720.
Grants and funding
LinkOut - more resources
Full Text Sources