

Understanding detection performance in public health surveillance: modeling aberrancy-detection algorithms
- PMID: 18755992
- PMCID: PMC2585528
- DOI: 10.1197/jamia.M2799
Understanding detection performance in public health surveillance: modeling aberrancy-detection algorithms
Abstract
Objective: Statistical aberrancy-detection algorithms play a central role in automated public health systems, analyzing large volumes of clinical and administrative data in real-time with the goal of detecting disease outbreaks rapidly and accurately. Not all algorithms perform equally well in terms of sensitivity, specificity, and timeliness in detecting disease outbreaks and the evidence describing the relative performance of different methods is fragmented and mainly qualitative.
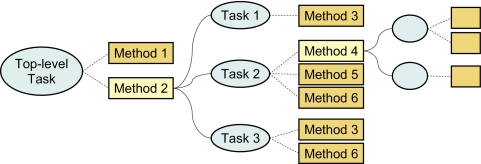
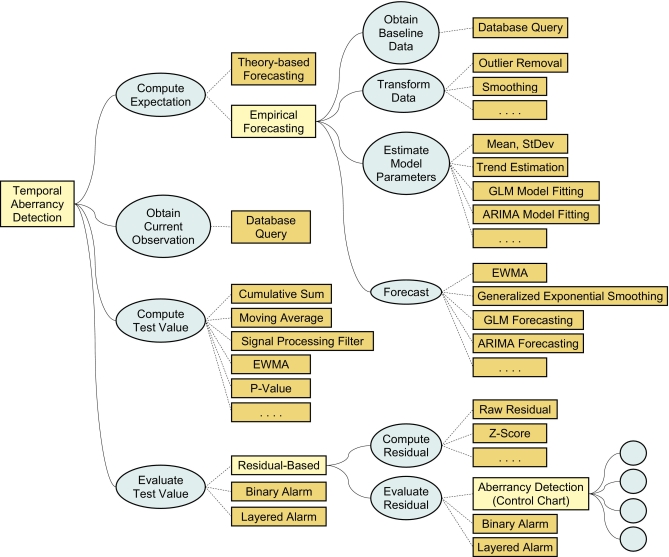
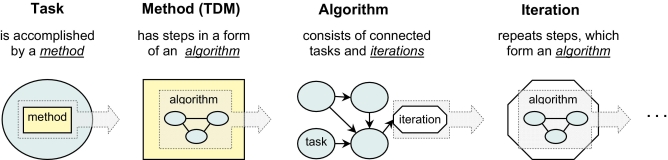
Design: We developed and evaluated a unified model of aberrancy-detection algorithms and a software infrastructure that uses this model to conduct studies to evaluate detection performance. We used a task-analytic methodology to identify the common features and meaningful distinctions among different algorithms and to provide an extensible framework for gathering evidence about the relative performance of these algorithms using a number of evaluation metrics. We implemented our model as part of a modular software infrastructure (Biological Space-Time Outbreak Reasoning Module, or BioSTORM) that allows configuration, deployment, and evaluation of aberrancy-detection algorithms in a systematic manner.
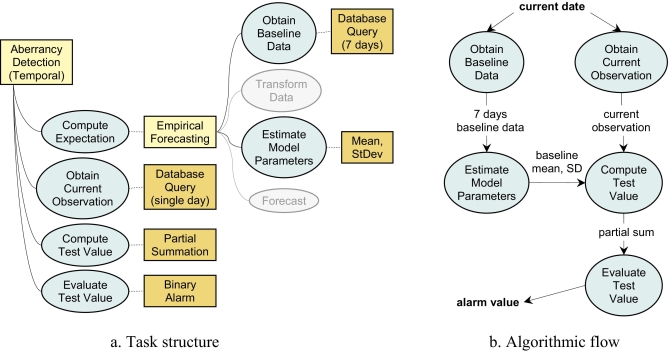
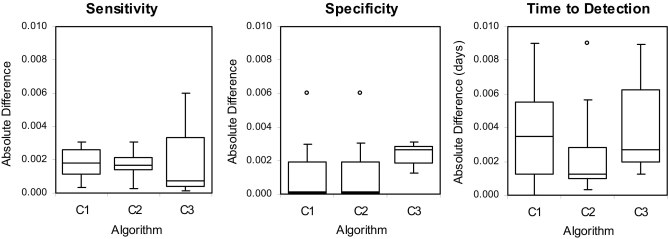
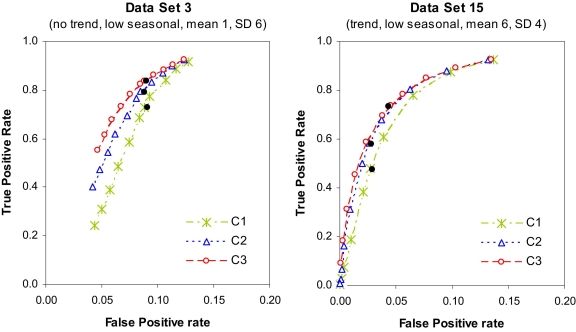
Measurement: We assessed the ability of our model to encode the commonly used EARS algorithms and the ability of the BioSTORM software to reproduce an existing evaluation study of these algorithms.
Results: Using our unified model of aberrancy-detection algorithms, we successfully encoded the EARS algorithms, deployed these algorithms using BioSTORM, and were able to reproduce and extend previously published evaluation results.
Conclusion: The validated model of aberrancy-detection algorithms and its software implementation will enable principled comparison of algorithms, synthesis of results from evaluation studies, and identification of surveillance algorithms for use in specific public health settings.
Figures
References
-
- Lombardo JS, Buckeridge DL, Lombardo JS. Disease surveillance: A public health informatics approachHoboken, NJ: John Willey & Sons; 2007.
-
- Wagner MM, Moore AW, Aryel RM. Handbook of biosurveillanceBurlington, MA: Elsevier; 2006.
-
- Heffernan R, Mostashari F, Das D, et al. New York City Syndromic Surveillance System Sydromic Surveillance: Reports from a National Conference. New York, NY: CDC; 2003. pp. 25-27.
-
- Loonsk JW. BioSense—a national initiative for early detection and quantification of public health emergencies. MMWR. Morbidity and Mortality Weekly Report 2004;53(Suppl):53-55. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
