

Recognition of natural scenes from global properties: seeing the forest without representing the trees
- PMID: 18762289
- PMCID: PMC2759758
- DOI: 10.1016/j.cogpsych.2008.06.001
Recognition of natural scenes from global properties: seeing the forest without representing the trees
Abstract
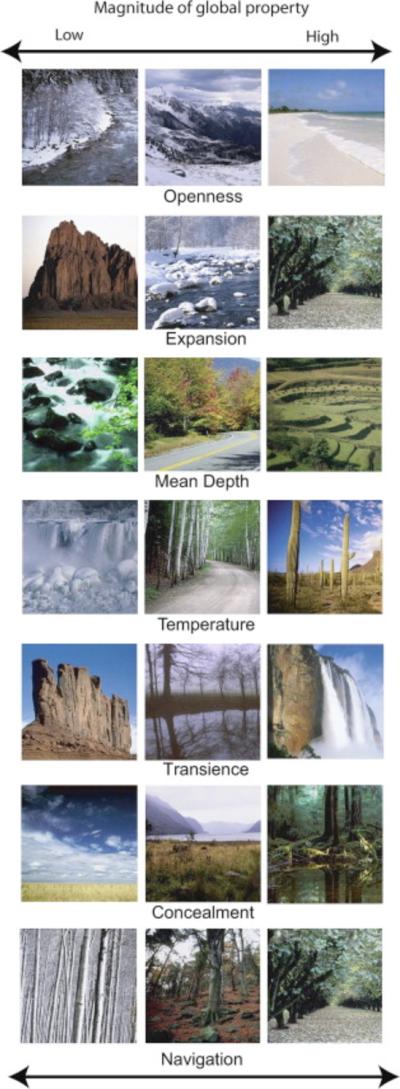
Human observers are able to rapidly and accurately categorize natural scenes, but the representation mediating this feat is still unknown. Here we propose a framework of rapid scene categorization that does not segment a scene into objects and instead uses a vocabulary of global, ecological properties that describe spatial and functional aspects of scene space (such as navigability or mean depth). In Experiment 1, we obtained ground truth rankings on global properties for use in Experiments 2-4. To what extent do human observers use global property information when rapidly categorizing natural scenes? In Experiment 2, we found that global property resemblance was a strong predictor of both false alarm rates and reaction times in a rapid scene categorization experiment. To what extent is global property information alone a sufficient predictor of rapid natural scene categorization? In Experiment 3, we found that the performance of a classifier representing only these properties is indistinguishable from human performance in a rapid scene categorization task in terms of both accuracy and false alarms. To what extent is this high predictability unique to a global property representation? In Experiment 4, we compared two models that represent scene object information to human categorization performance and found that these models had lower fidelity at representing the patterns of performance than the global property model. These results provide support for the hypothesis that rapid categorization of natural scenes may not be mediated primarily though objects and parts, but also through global properties of structure and affordance.
Figures









References
-
- Appelton J. The experience of landscape. Wiley; London: 1975.
-
- Ariely D. Seeing sets: Representation by statistical properties. Psychological Science. 2001;12:157–162. - PubMed
-
- Ashby F, Lee W. Predicting similarity and categorization from identification. Journal of Experimental Psychology: General. 1991;120(2):150–172. - PubMed
-
- Bar M. Visual objects in context. Nature Reviews: Neuroscience. 2004;5:617–629. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
