

Computational approaches to spatial orientation: from transfer functions to dynamic Bayesian inference
- PMID: 18842952
- PMCID: PMC2604843
- DOI: 10.1152/jn.90677.2008
Computational approaches to spatial orientation: from transfer functions to dynamic Bayesian inference
Abstract
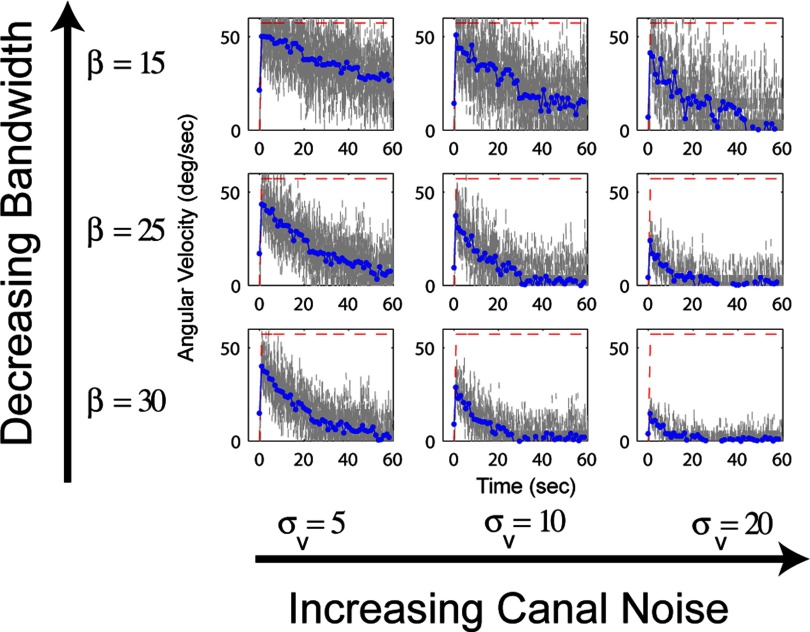
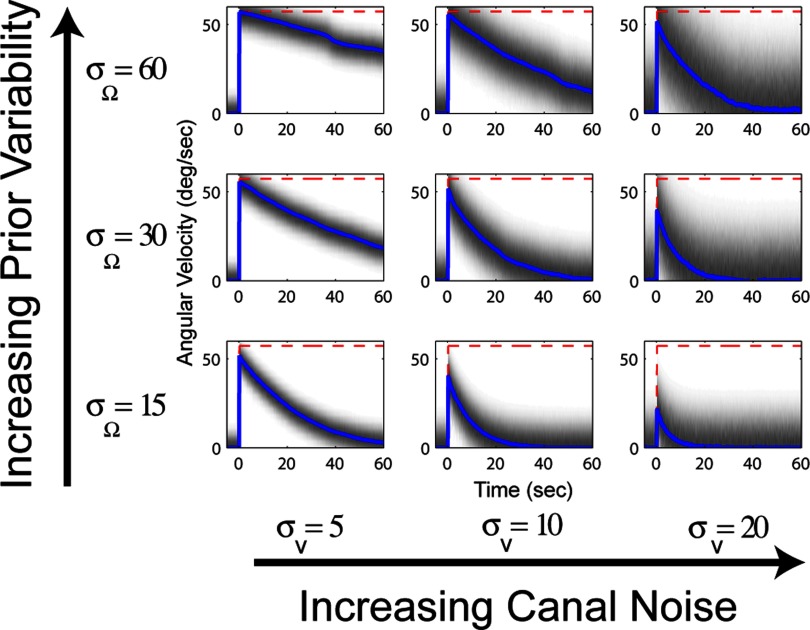
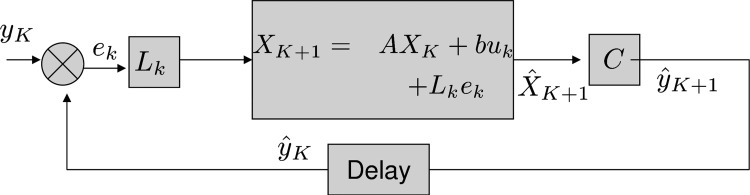
Spatial orientation is the sense of body orientation and self-motion relative to the stationary environment, fundamental to normal waking behavior and control of everyday motor actions including eye movements, postural control, and locomotion. The brain achieves spatial orientation by integrating visual, vestibular, and somatosensory signals. Over the past years, considerable progress has been made toward understanding how these signals are processed by the brain using multiple computational approaches that include frequency domain analysis, the concept of internal models, observer theory, Bayesian theory, and Kalman filtering. Here we put these approaches in context by examining the specific questions that can be addressed by each technique and some of the scientific insights that have resulted. We conclude with a recent application of particle filtering, a probabilistic simulation technique that aims to generate the most likely state estimates by incorporating internal models of sensor dynamics and physical laws and noise associated with sensory processing as well as prior knowledge or experience. In this framework, priors for low angular velocity and linear acceleration can explain the phenomena of velocity storage and frequency segregation, both of which have been modeled previously using arbitrary low-pass filtering. How Kalman and particle filters may be implemented by the brain is an emerging field. Unlike past neurophysiological research that has aimed to characterize mean responses of single neurons, investigations of dynamic Bayesian inference should attempt to characterize population activities that constitute probabilistic representations of sensory and prior information.
Figures
References
-
- Angelaki DE Eyes on target: what neurons must do for the vestibuloocular reflex during linear motion. J Neurophysiol 92: 20–35, 2004. - PubMed
-
- Angelaki DE, Cullen KE. Vestibular system: the many facets of a multimodal sense. Annu Rev Neurosci 31: 125–150, 2008. - PubMed
-
- Angelaki DE, Dickman JD. Spatiotemporal processing of linear acceleration: primary afferent and central vestibular neuron responses. J Neurophysiol 84: 2113–2132, 2000. - PubMed
-
- Angelaki DE, Shaikh AG, Green AM, Dickman JD. Neurons compute internal models of the physical laws of motion. Nature 430: 560–564, 2004. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Miscellaneous