

Motion control of musculoskeletal systems with redundancy
- PMID: 18985380
- PMCID: PMC2736911
- DOI: 10.1007/s00422-008-0258-5
Motion control of musculoskeletal systems with redundancy
Abstract
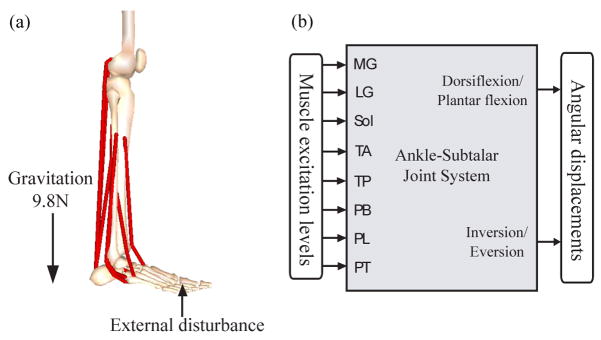
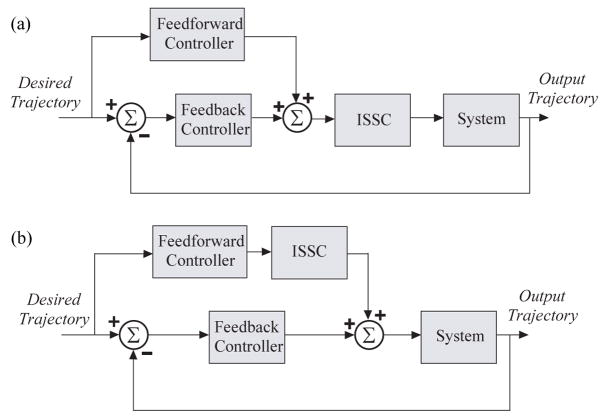
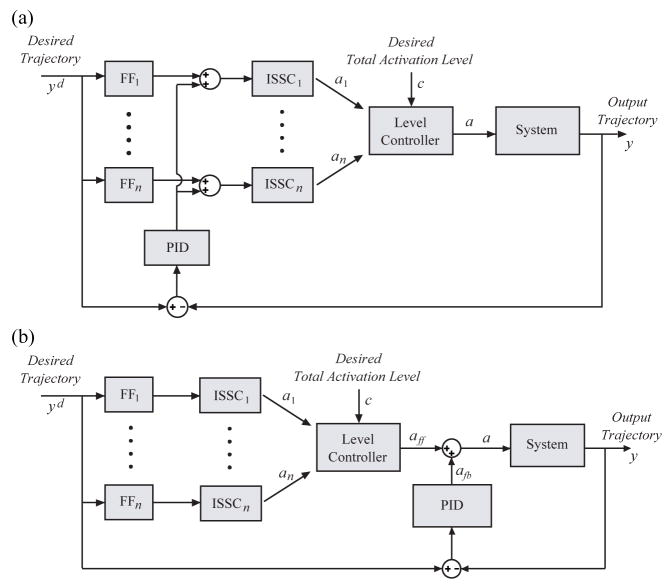
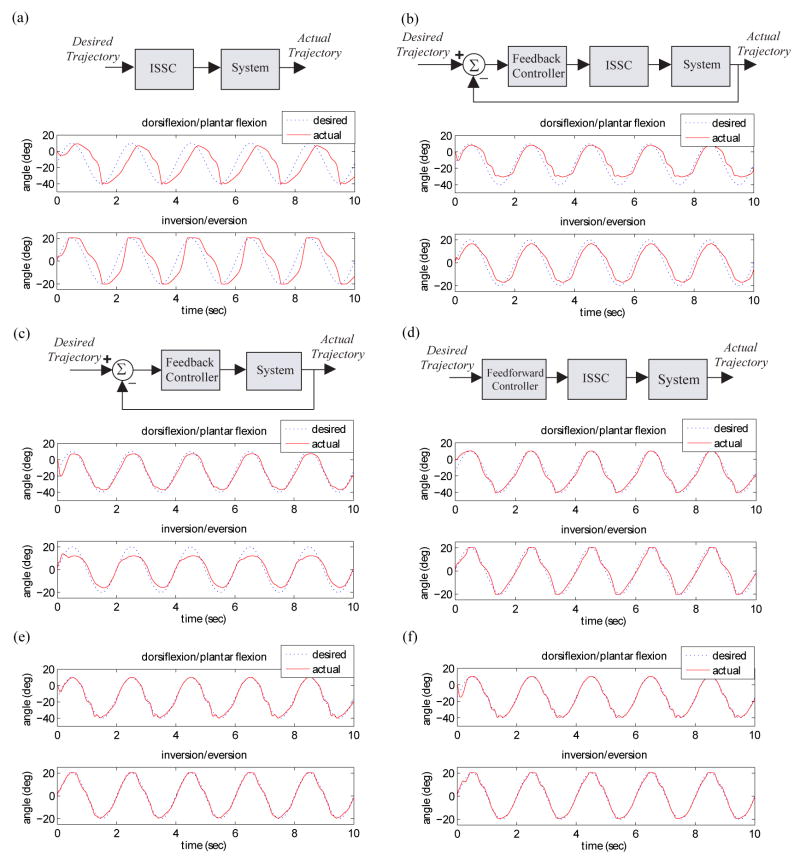
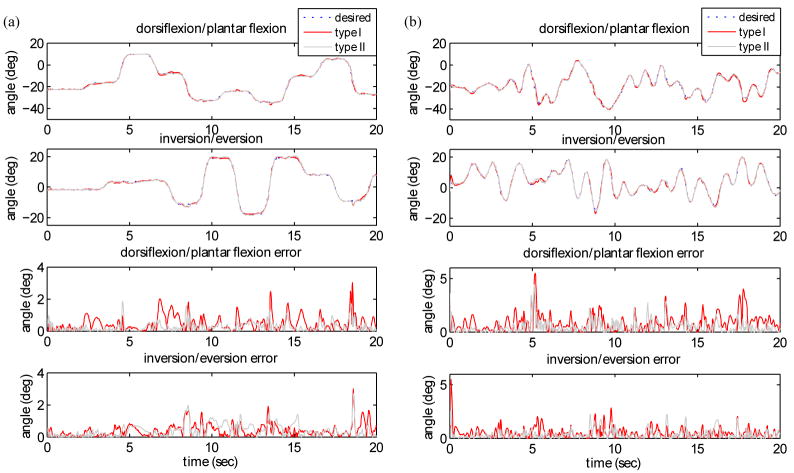
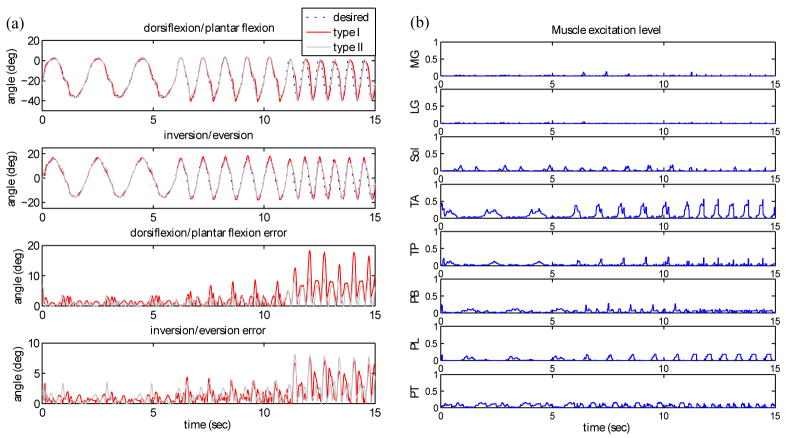
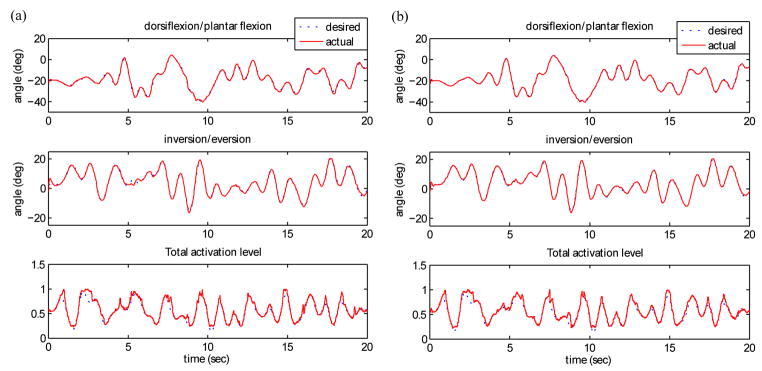
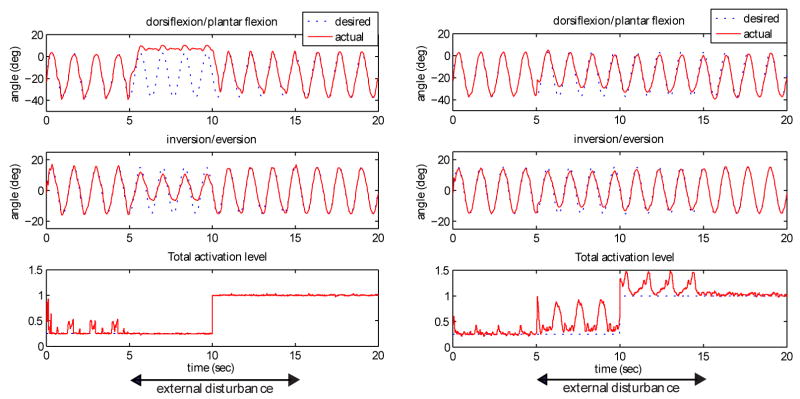
Motion control of musculoskeletal systems for functional electrical stimulation (FES) is a challenging problem due to the inherent complexity of the systems. These include being highly nonlinear, strongly coupled, time-varying, time-delayed, and redundant. The redundancy in particular makes it difficult to find an inverse model of the system for control purposes. We have developed a control system for multiple input multiple output (MIMO) redundant musculoskeletal systems with little prior information. The proposed method separates the steady-state properties from the dynamic properties. The dynamic control uses a steady-state inverse model and is implemented with both a PID controller for disturbance rejection and an artificial neural network (ANN) feedforward controller for fast trajectory tracking. A mechanism to control the sum of the muscle excitation levels is also included. To test the performance of the proposed control system, a two degree of freedom ankle-subtalar joint model with eight muscles was used. The simulation results show that separation of steady-state and dynamic control allow small output tracking errors for different reference trajectories such as pseudo-step, sinusoidal and filtered random signals. The proposed control method also demonstrated robustness against system parameter and controller parameter variations. A possible application of this control algorithm is FES control using multiple contact cuff electrodes where mathematical modeling is not feasible and the redundancy makes the control of dynamic movement difficult.
Figures
References
-
- Abbas JJ, Triolo RJ. Experimental evaluation of an adaptive feedforward controller for use in functional neuromuscular stimulation systems. IEEE Transactions on Rehabilitation Engineering. 1997;5:12–22. - PubMed
-
- Adamczyk MM, Crago PE. Simulated feedforward neural network coordiantion of hand grasp and wrist angle in a neuroprosthesis. IEEE Transactions on Rehabilitation Engineering. 2000;8:297–304. - PubMed
-
- Anderson FC, Pandy MG. Static and dynamic optimization solutions for gait are practically equivalent. Journal of Biomechanics. 2001;34:153–161. - PubMed
-
- Chang G-C, Lub J-J, Liao G-D, Lai J-S, Cheng C-K, Kuo B-L, Kuo T-S. A neuro-control system for the knee joint position control with quadriceps stimulation. Rehabilitation Engineering, IEEE Transactions on. 1997;5:2–11. - PubMed
-
- Crago PE, Peckham PH, Thrope GB. Modulation of muscle force by recruitment during intramuscular stimulation. Ieee Transactions on Biomedical Engineering. 1980;27:679–684. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Miscellaneous
