

Maintenance of lateral stability during standing and walking in the cat
- PMID: 19004997
- PMCID: PMC2637002
- DOI: 10.1152/jn.90934.2008
Maintenance of lateral stability during standing and walking in the cat
Abstract
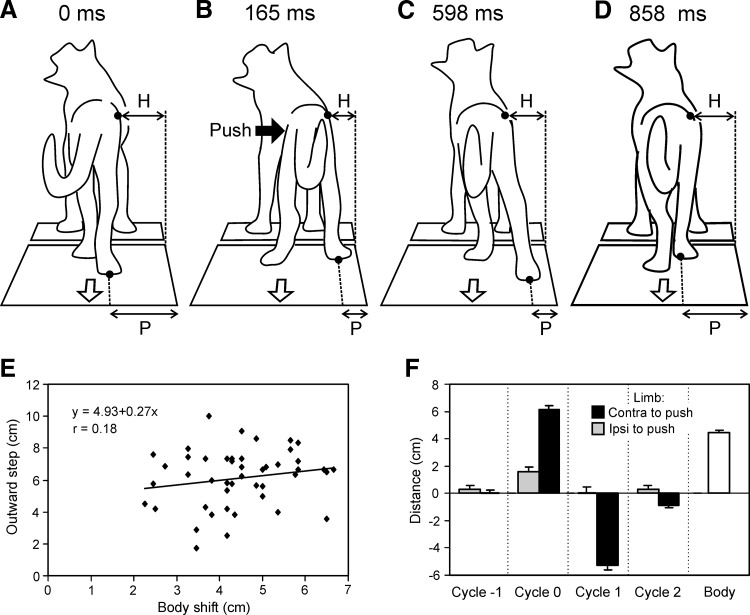
During free behaviors animals often experience lateral forces, such as collisions with obstacles or interactions with other animals. We studied postural reactions to lateral pulses of force (pushes) in the cat during standing and walking. During standing, a push applied to the hip region caused a lateral deviation of the caudal trunk, followed by a return to the initial position. The corrective hindlimb electromyographic (EMG) pattern included an initial wave of excitation in most extensors of the hindlimb contralateral to push and inhibition of those in the ipsilateral limb. In cats walking on a treadmill with only hindlimbs, application of force also caused lateral deviation of the caudal trunk, with subsequent return to the initial position. The type of corrective movement depended on the pulse timing relative to the step cycle. If the force was applied at the end of the stance phase of one of the limbs or during its swing phase, a lateral component appeared in the swing trajectory of this limb. The corrective step was directed either inward (when the corrective limb was ipsilateral to force application) or outward (when it was contralateral). The EMG pattern in the corrective limb was characterized by considerable modification of the hip abductor and adductor activity in the perturbed step. Thus the basic mechanisms for balance control in these two forms of behavior are different. They perform a redistribution of muscle activity between symmetrical limbs (in standing) and a reconfiguration of the base of support during a corrective lateral step (in walking).
Figures









Similar articles
-
Attributes of quiet stance in the chronic spinal cat.J Neurophysiol. 1999 Dec;82(6):3056-65. doi: 10.1152/jn.1999.82.6.3056. J Neurophysiol. 1999. PMID: 10601441
-
Weight support and balance during perturbed stance in the chronic spinal cat.J Neurophysiol. 1999 Dec;82(6):3066-81. doi: 10.1152/jn.1999.82.6.3066. J Neurophysiol. 1999. PMID: 10601442
-
Adaptive control for backward quadrupedal walking V. Mutable activation of bifunctional thigh muscles.J Neurophysiol. 1996 Feb;75(2):832-42. doi: 10.1152/jn.1996.75.2.832. J Neurophysiol. 1996. PMID: 8714656
-
Control of frontal plane motion of the hindlimbs in the unrestrained walking cat.J Neurophysiol. 2006 Oct;96(4):1816-28. doi: 10.1152/jn.00370.2006. Epub 2006 Jul 5. J Neurophysiol. 2006. PMID: 16823027
-
Contributions to the understanding of gait control.Dan Med J. 2014 Apr;61(4):B4823. Dan Med J. 2014. PMID: 24814597 Review.
Cited by
-
Limb and trunk mechanisms for balance control during locomotion in quadrupeds.J Neurosci. 2014 Apr 16;34(16):5704-16. doi: 10.1523/JNEUROSCI.4663-13.2014. J Neurosci. 2014. PMID: 24741060 Free PMC article.
-
Spinal and supraspinal control of the direction of stepping during locomotion.J Neurosci. 2012 Nov 28;32(48):17442-53. doi: 10.1523/JNEUROSCI.3757-12.2012. J Neurosci. 2012. PMID: 23197735 Free PMC article.
-
Hindlimb Somatosensory Information Influences Trunk Sensory and Motor Cortices to Support Trunk Stabilization.Cereb Cortex. 2021 Oct 1;31(11):5165-5187. doi: 10.1093/cercor/bhab150. Cereb Cortex. 2021. PMID: 34165153 Free PMC article.
-
Alteration of Postural Reactions in Rats with Different Levels of Dopamine Depletion.Biomedicines. 2023 Jul 11;11(7):1958. doi: 10.3390/biomedicines11071958. Biomedicines. 2023. PMID: 37509596 Free PMC article.
-
Neural dynamics of robust legged robots.Front Robot AI. 2024 Apr 18;11:1324404. doi: 10.3389/frobt.2024.1324404. eCollection 2024. Front Robot AI. 2024. PMID: 38699630 Free PMC article.
References
-
- Barbeau H, Rossignol S. Recovery of locomotion after chronic spinalization in the adult cat. Brain Res 412: 84–95, 1987. - PubMed
-
- Bard P Studies on the cerebral cortex. I. Localized control of placing and hopping reactions in the cat and their normal management by small cortical remnants. Arch Neurol Psychiatry 30: 40–74, 1933.
-
- Bard P, Macht MB. The behavior of chronically decerebrate cats. In: Neurological Basis of Behavior, edited by Wolstenholme GEW, O'Connor CM. London: Churchill, 1958, p. 55–71.
-
- Beloozerova IN, Sirota MG, Orlovsky GN, Deliagina TG. Activity of pyramidal tract neurons in the cat during postural corrections. J Neurophysiol 93: 1831–1844, 2005. - PubMed
-
- Beloozerova IN, Zelenin PV, Popova LB, Orlovsky GN, Grillner S, Deliagina TG. Postural control in the rabbit maintaining balance on the tilting platform. J Neurophysiol 90: 3783–3793, 2003. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Medical
Miscellaneous